Divide and Conquer
Fusion 360 file to ROS URDF 본문
728x90
GitHub - syuntoku14/fusion2urdf: A Fusion 360 Script to export URDF
A Fusion 360 Script to export URDF. Contribute to syuntoku14/fusion2urdf development by creating an account on GitHub.
github.com
- fusion360이 window에 깔려있다면 윈도우에 해당 코드 다운로드를 한다
- cmd 열어서 코드가 있는 폴더로 들어간다
- 아래 Copy 코드 실행
- Fusion 360 - 유틸리티- 에드인- 내 스크립트에 URDF_Exporter이 생김
- catkin_ws에 옮겨 빌드 후 실행
윈도우에서
cd <path to fusion2urdf>
Copy-Item ".\URDF_Exporter\" -Destination "${env:APPDATA}\Autodesk\Autodesk Fusion 360\API\Scripts\" -Recurse
or
Copy-Item ".\URDF_Exporter\" -Destination "C:\Users\사용자이름\AppData\Local\Autodesk\Autodesk Fusion 360\API\Scripts\" -Recurseroscore
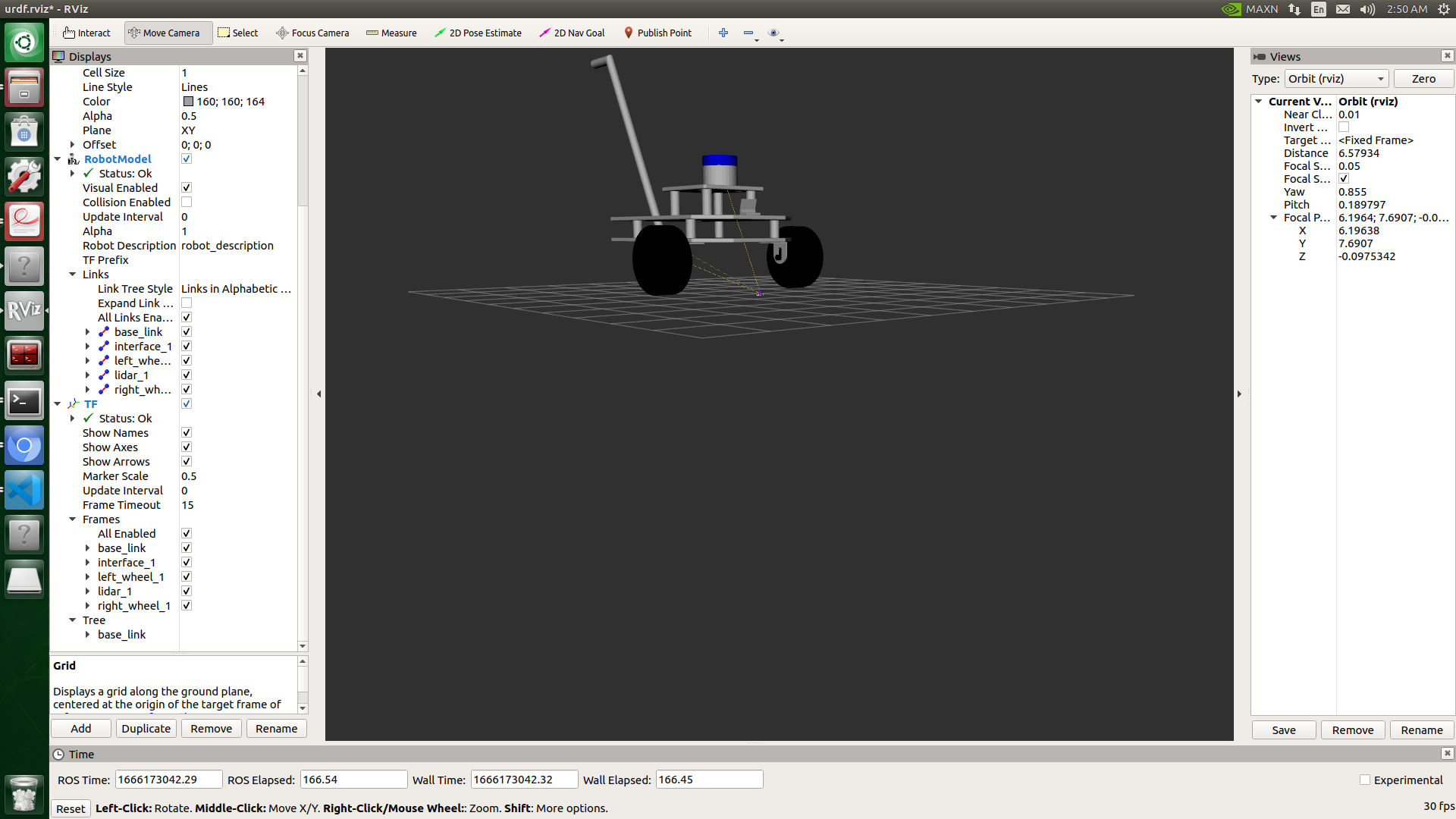
roslaunch urdf_2_description display.launch








더보기
CMakeLists.txt
cmake_minimum_required(VERSION 2.8.3)
project(urdf_2_description)
## Compile as C++11, supported in ROS Kinetic and newer
# add_compile_options(-std=c++11)
## Find catkin macros and libraries
## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz)
## is used, also find other catkin packages
find_package(catkin REQUIRED COMPONENTS
rospy
)
## System dependencies are found with CMake's conventions
# find_package(Boost REQUIRED COMPONENTS system)
## Uncomment this if the package has a setup.py. This macro ensures
## modules and global scripts declared therein get installed
## See http://ros.org/doc/api/catkin/html/user_guide/setup_dot_py.html
# catkin_python_setup()
################################################
## Declare ROS messages, services and actions ##
################################################
## To declare and build messages, services or actions from within this
## package, follow these steps:
## * Let MSG_DEP_SET be the set of packages whose message types you use in
## your messages/services/actions (e.g. std_msgs, actionlib_msgs, ...).
## * In the file package.xml:
## * add a build_depend tag for "message_generation"
## * add a build_depend and a exec_depend tag for each package in MSG_DEP_SET
## * If MSG_DEP_SET isn't empty the following dependency has been pulled in
## but can be declared for certainty nonetheless:
## * add a exec_depend tag for "message_runtime"
## * In this file (CMakeLists.txt):
## * add "message_generation" and every package in MSG_DEP_SET to
## find_package(catkin REQUIRED COMPONENTS ...)
## * add "message_runtime" and every package in MSG_DEP_SET to
## catkin_package(CATKIN_DEPENDS ...)
## * uncomment the add_*_files sections below as needed
## and list every .msg/.srv/.action file to be processed
## * uncomment the generate_messages entry below
## * add every package in MSG_DEP_SET to generate_messages(DEPENDENCIES ...)
## Generate messages in the 'msg' folder
# add_message_files(
# FILES
# Message1.msg
# Message2.msg
# )
## Generate services in the 'srv' folder
# add_service_files(
# FILES
# Service1.srv
# Service2.srv
# )
## Generate actions in the 'action' folder
# add_action_files(
# FILES
# Action1.action
# Action2.action
# )
## Generate added messages and services with any dependencies listed here
# generate_messages(
# DEPENDENCIES
# std_msgs # Or other packages containing msgs
# )
################################################
## Declare ROS dynamic reconfigure parameters ##
################################################
## To declare and build dynamic reconfigure parameters within this
## package, follow these steps:
## * In the file package.xml:
## * add a build_depend and a exec_depend tag for "dynamic_reconfigure"
## * In this file (CMakeLists.txt):
## * add "dynamic_reconfigure" to
## find_package(catkin REQUIRED COMPONENTS ...)
## * uncomment the "generate_dynamic_reconfigure_options" section below
## and list every .cfg file to be processed
## Generate dynamic reconfigure parameters in the 'cfg' folder
# generate_dynamic_reconfigure_options(
# cfg/DynReconf1.cfg
# cfg/DynReconf2.cfg
# )
###################################
## catkin specific configuration ##
###################################
## The catkin_package macro generates cmake config files for your package
## Declare things to be passed to dependent projects
## INCLUDE_DIRS: uncomment this if your package contains header files
## LIBRARIES: libraries you create in this project that dependent projects also need
## CATKIN_DEPENDS: catkin_packages dependent projects also need
## DEPENDS: system dependencies of this project that dependent projects also need
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES fusion2urdf
# CATKIN_DEPENDS rospy
# DEPENDS system_lib
)
###########
## Build ##
###########
## Specify additional locations of header files
## Your package locations should be listed before other locations
include_directories(
# include
${catkin_INCLUDE_DIRS}
)
## Declare a C++ library
# add_library(${PROJECT_NAME}
# src/${PROJECT_NAME}/fusion2urdf.cpp
# )
## Add cmake target dependencies of the library
## as an example, code may need to be generated before libraries
## either from message generation or dynamic reconfigure
# add_dependencies(${PROJECT_NAME} ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
## Declare a C++ executable
## With catkin_make all packages are built within a single CMake context
## The recommended prefix ensures that target names across packages don't collide
# add_executable(${PROJECT_NAME}_node src/fusion2urdf_node.cpp)
## Rename C++ executable without prefix
## The above recommended prefix causes long target names, the following renames the
## target back to the shorter version for ease of user use
## e.g. "rosrun someones_pkg node" instead of "rosrun someones_pkg someones_pkg_node"
# set_target_properties(${PROJECT_NAME}_node PROPERTIES OUTPUT_NAME node PREFIX "")
## Add cmake target dependencies of the executable
## same as for the library above
# add_dependencies(${PROJECT_NAME}_node ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
## Specify libraries to link a library or executable target against
# target_link_libraries(${PROJECT_NAME}_node
# ${catkin_LIBRARIES}
# )
#############
## Install ##
#############
# all install targets should use catkin DESTINATION variables
# See http://ros.org/doc/api/catkin/html/adv_user_guide/variables.html
## Mark executable scripts (Python etc.) for installation
## in contrast to setup.py, you can choose the destination
# install(PROGRAMS
# scripts/my_python_script
# DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
# )
## Mark executables and/or libraries for installation
# install(TARGETS ${PROJECT_NAME} ${PROJECT_NAME}_node
# ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
# LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
# RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
# )
## Mark cpp header files for installation
# install(DIRECTORY include/${PROJECT_NAME}/
# DESTINATION ${CATKIN_PACKAGE_INCLUDE_DESTINATION}
# FILES_MATCHING PATTERN "*.h"
# PATTERN ".svn" EXCLUDE
# )
## Mark other files for installation (e.g. launch and bag files, etc.)
# install(FILES
# # myfile1
# # myfile2
# DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}
# )
#############
## Testing ##
#############
## Add gtest based cpp test target and link libraries
# catkin_add_gtest(${PROJECT_NAME}-test test/test_fusion2urdf.cpp)
# if(TARGET ${PROJECT_NAME}-test)
# target_link_libraries(${PROJECT_NAME}-test ${PROJECT_NAME})
# endif()
## Add folders to be run by python nosetests
# catkin_add_nosetests(test)package.xml
<?xml version="1.0"?>
<package format="2">
<name>urdf_2_description</name>
<version>0.0.0</version>
<description>The urdf_2_description package</description>
<!-- One maintainer tag required, multiple allowed, one person per tag -->
<!-- Example: -->
<!-- <maintainer email="jane.doe@example.com">Jane Doe</maintainer> -->
<maintainer email="syuntoku14@todo.todo">syuntoku14</maintainer>
<!-- One license tag required, multiple allowed, one license per tag -->
<!-- Commonly used license strings: -->
<!-- BSD, MIT, Boost Software License, GPLv2, GPLv3, LGPLv2.1, LGPLv3 -->
<license>TODO</license>
<!-- Url tags are optional, but multiple are allowed, one per tag -->
<!-- Optional attribute type can be: website, bugtracker, or repository -->
<!-- Example: -->
<!-- <url type="website">http://wiki.ros.org/fusion2urdf</url> -->
<!-- Author tags are optional, multiple are allowed, one per tag -->
<!-- Authors do not have to be maintainers, but could be -->
<!-- Example: -->
<!-- <author email="jane.doe@example.com">Jane Doe</author> -->
<!-- The *depend tags are used to specify dependencies -->
<!-- Dependencies can be catkin packages or system dependencies -->
<!-- Examples: -->
<!-- Use depend as a shortcut for packages that are both build and exec dependencies -->
<!-- <depend>roscpp</depend> -->
<!-- Note that this is equivalent to the following: -->
<!-- <build_depend>roscpp</build_depend> -->
<!-- <exec_depend>roscpp</exec_depend> -->
<!-- Use build_depend for packages you need at compile time: -->
<!-- <build_depend>message_generation</build_depend> -->
<!-- Use build_export_depend for packages you need in order to build against this package: -->
<!-- <build_export_depend>message_generation</build_export_depend> -->
<!-- Use buildtool_depend for build tool packages: -->
<!-- <buildtool_depend>catkin</buildtool_depend> -->
<!-- Use exec_depend for packages you need at runtime: -->
<!-- <exec_depend>message_runtime</exec_depend> -->
<!-- Use test_depend for packages you need only for testing: -->
<!-- <test_depend>gtest</test_depend> -->
<!-- Use doc_depend for packages you need only for building documentation: -->
<!-- <doc_depend>doxygen</doc_depend> -->
<buildtool_depend>catkin</buildtool_depend>
<build_depend>rospy</build_depend>
<build_export_depend>rospy</build_export_depend>
<exec_depend>rospy</exec_depend>
<!-- The export tag contains other, unspecified, tags -->
<export>
<!-- Other tools can request additional information be placed here -->
</export>
</package>display.launch
<launch>
<arg name="model" default="$(find urdf_2_description)/urdf/urdf_2.xacro"/>
<arg name="gui" default="true"/>
<arg name="rvizconfig" default="$(find urdf_2_description)/launch/urdf.rviz"/>
<param name="robot_description" command="$(find xacro)/xacro $(arg model)"/>
<param name="use_gui" value="$(arg gui)"/>
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher"/>
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher"/>
<node name="rviz" pkg="rviz" args="-d $(arg rvizconfig)" type="rviz" required="true"/>
</launch>controller.launch
<launch>
<rosparam file="$(find urdf_2_description)/launch/controller.yaml" command="load"/>
<node name="controller_spawner" pkg="controller_manager" type="spawner" respawn="false" output="screen" ns="urdf_2" args="joint_state_controller "/>
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" respawn="false" output="screen">
<remap from="/joint_states" to="/urdf_2/joint_states"/>
</node>
</launch>gazebo.launch
<launch>
<param name="robot_description" command="$(find xacro)/xacro $(find urdf_2_description)/urdf/urdf_2.xacro"/>
<node name="spawn_urdf" pkg="gazebo_ros" type="spawn_model" args="-param robot_description -urdf -model urdf_2"/>
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="paused" value="true"/>
<arg name="use_sim_time" value="true"/>
<arg name="gui" value="true"/>
<arg name="headless" value="false"/>
<arg name="debug" value="false"/>
</include>
</launch>controller.yaml
urdf_2_controller:
# Publish all joint states -----------------------------------
joint_state_controller:
type: joint_state_controller/JointStateController
publish_rate: 50
# Position Controllers --------------------------------------urdf.rviz
Panels:
- Class: rviz/Displays
Help Height: 78
Name: Displays
Property Tree Widget:
Expanded:
- /Global Options1
- /Status1
- /RobotModel1
- /TF1
Splitter Ratio: 0.5
Tree Height: 591
- Class: rviz/Selection
Name: Selection
- Class: rviz/Tool Properties
Expanded:
- /2D Pose Estimate1
- /2D Nav Goal1
- /Publish Point1
Name: Tool Properties
Splitter Ratio: 0.5886790156364441
- Class: rviz/Views
Expanded:
- /Current View1
Name: Views
Splitter Ratio: 0.5
- Class: rviz/Time
Experimental: false
Name: Time
SyncMode: 0
SyncSource: ""
Preferences:
PromptSaveOnExit: true
Toolbars:
toolButtonStyle: 2
Visualization Manager:
Class: ""
Displays:
- Alpha: 0.5
Cell Size: 1
Class: rviz/Grid
Color: 160; 160; 164
Enabled: true
Line Style:
Line Width: 0.029999999329447746
Value: Lines
Name: Grid
Normal Cell Count: 0
Offset:
X: 0
Y: 0
Z: 0
Plane: XY
Plane Cell Count: 10
Reference Frame: <Fixed Frame>
Value: true
- Alpha: 1
Class: rviz/RobotModel
Collision Enabled: false
Enabled: true
Links:
2dofknuckle_link_1:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
2dofknuckle_link_10:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
2dofknuckle_link_2:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
2dofknuckle_link_3:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
2dofknuckle_link_4:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
2dofknuckle_link_5:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
2dofknuckle_link_6:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
2dofknuckle_link_7:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
2dofknuckle_link_8:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
2dofknuckle_link_9:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
All Links Enabled: true
Expand Joint Details: false
Expand Link Details: false
Expand Tree: false
Link Tree Style: Links in Alphabetic Order
base_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
bucket_link_1:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
face_link_1:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
facebracket_link_1:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
hcsr04_cans_link_1:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
hcsr04_chips_link_1:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
hcsr04_link_1:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
leg_link_1:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
leg_link_2:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
leg_link_3:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
leg_link_4:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
lipo_link_1:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
mg90_link_1:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
mg90_link_10:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
mg90_link_2:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
mg90_link_3:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
mg90_link_4:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
mg90_link_5:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
mg90_link_6:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
mg90_link_7:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
mg90_link_8:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
mg90_link_9:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
mpu9250_cap_link_1:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
mpu9250_link_1:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
mpu9250_mpu_link_1:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
pizerow_cam_link_1:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
pizerow_con_link_1:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
pizerow_cpu_link_1:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
pizerow_link_1:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
raspicam_cam_link_1:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
raspicam_chips_link_1:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
raspicam_con_link_1:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
raspicam_link_1:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
servobottom_link_1:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
servobottom_link_10:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
servobottom_link_2:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
servobottom_link_3:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
servobottom_link_4:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
servobottom_link_5:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
servobottom_link_6:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
servobottom_link_7:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
servobottom_link_8:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
servobottom_link_9:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
shell_link_1:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
Name: RobotModel
Robot Description: robot_description
TF Prefix: ""
Update Interval: 0
Value: true
Visual Enabled: true
- Class: rviz/TF
Enabled: false
Frame Timeout: 15
Frames:
All Enabled: true
Marker Scale: 0.5
Name: TF
Show Arrows: true
Show Axes: true
Show Names: true
Tree:
{}
Update Interval: 0
Value: false
Enabled: true
Global Options:
Background Color: 48; 48; 48
Default Light: true
Fixed Frame: base_link
Frame Rate: 30
Name: root
Tools:
- Class: rviz/Interact
Hide Inactive Objects: true
- Class: rviz/MoveCamera
- Class: rviz/Select
- Class: rviz/FocusCamera
- Class: rviz/Measure
- Class: rviz/SetInitialPose
Theta std deviation: 0.2617993950843811
Topic: /initialpose
X std deviation: 0.5
Y std deviation: 0.5
- Class: rviz/SetGoal
Topic: /move_base_simple/goal
- Class: rviz/PublishPoint
Single click: true
Topic: /clicked_point
Value: true
Views:
Current:
Class: rviz/Orbit
Distance: 0.34426525235176086
Enable Stereo Rendering:
Stereo Eye Separation: 0.05999999865889549
Stereo Focal Distance: 1
Swap Stereo Eyes: false
Value: false
Focal Point:
X: -0.0016349668148905039
Y: -0.014781012199819088
Z: 0.017814036458730698
Focal Shape Fixed Size: true
Focal Shape Size: 0.05000000074505806
Invert Z Axis: false
Name: Current View
Near Clip Distance: 0.009999999776482582
Pitch: 0.46039697527885437
Target Frame: <Fixed Frame>
Value: Orbit (rviz)
Yaw: 0.593582272529602
Saved: ~
Window Geometry:
Displays:
collapsed: false
Height: 882
Hide Left Dock: false
Hide Right Dock: false
QMainWindow State: 000000ff00000000fd000000040000000000000142000002d9fc0200000008fb0000001200530065006c0065006300740069006f006e00000001e10000009b0000005d00fffffffb0000001e0054006f006f006c002000500072006f007000650072007400690065007302000001ed000001df00000185000000a3fb000000120056006900650077007300200054006f006f02000001df000002110000018500000122fb000000200054006f006f006c002000500072006f0070006500720074006900650073003203000002880000011d000002210000017afb000000100044006900730070006c0061007900730100000037000002d9000000ca00fffffffb0000002000730065006c0065006300740069006f006e00200062007500660066006500720200000138000000aa0000023a00000294fb00000014005700690064006500530074006500720065006f02000000e6000000d2000003ee0000030bfb0000000c004b0069006e0065006300740200000186000001060000030c00000261000000010000010f000002d9fc0200000003fb0000001e0054006f006f006c002000500072006f00700065007200740069006500730100000041000000780000000000000000fb0000000a005600690065007700730100000037000002d9000000a100fffffffb0000001200530065006c0065006300740069006f006e010000025a000000b200000000000000000000000200000490000000a9fc0100000001fb0000000a00560069006500770073030000004e00000080000002e10000019700000003000004c000000044fc0100000002fb0000000800540069006d00650100000000000004c00000026b00fffffffb0000000800540069006d0065010000000000000450000000000000000000000267000002d900000004000000040000000800000008fc0000000100000002000000010000000a0054006f006f006c00730100000000ffffffff0000000000000000
Selection:
collapsed: false
Time:
collapsed: false
Tool Properties:
collapsed: false
Views:
collapsed: false
Width: 1216
X: 700
Y: 385
참고
Fusion 360 URDF 설치
퓨전 360에서 URDF를 만들기 위해서는 스크립트를 이용해야한다. syuntoku14/fusion2urdf: URDF를 내보내는 퓨전 360 스크립트 (github.com) 위에 링크로 들어가서 코드를 다운받고, 압축을 푼다. windows powers..
informluke.tistory.com
반응형
'2025 > ROS' 카테고리의 다른 글
| 서비스 패키지 생성 (0) | 2022.08.17 |
|---|---|
| ROS Setting Alias (0) | 2022.08.17 |
| Window에 ROS 설치 (0) | 2022.08.08 |
| ydlidar X4로 Hector SLAM (2) | 2022.06.30 |
| ydlidar X4 동작 확인 (0) | 2022.06.29 |
'2025/ROS' Related Articles
more



Comments