Divide and Conquer
[Jetbot] Jetson nano Motor Control 본문
728x90




젯슨 나노는 PWM을 지원하지 않기 때문에 PCA9685와 모터 드라이버 L298N을 이용했다
sudo usermod -aG i2c jetbot
확인
#sudo i2cdetect -r -y 1
#cd /usr/local/lib/python3.6/dist-packages/Adafruit_MotorHAT-1.4.0-py3.6.egg/Adafruit_MotorHAT/
#sudo vim Adafruit_MotorHAT_Motors.py#i2c device list command
#$ sudo i2cdetect -r -y 1
#i2cdump -y 1 0x40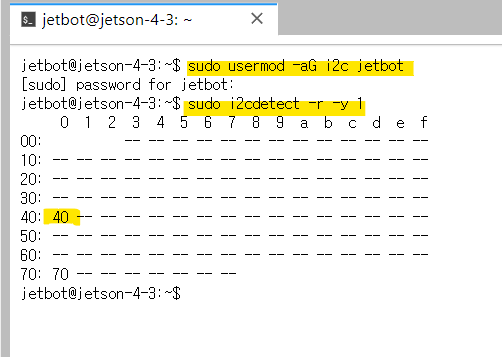

$sudo vim /usr/local/lib/python3.6/dist-packages/Adafruit_MotorHAT-1.4.0-py3.6.egg/Adafruit_MotorHAT/Adafruit_MotorHAT_Motors.py
cd /usr/local/lib/python3.6/dist-packages/Adafruit_MotorHAT-1.4.0-py3.6.egg/Adafruit_MotorHAT/
sudo vim Adafruit_MotorHAT_Motors.pyTeleoperation
게임패드 연결 확인 사이트 http://html5gamepad.com
import ipywidgets.widgets as widgets
#1을 0으로 바꿔
#controller = widgets.Controller(index=1)
controller = widgets.Controller(index=0)
#눌러야 화면이 나와
display(controller)#-0.7*x 로 속도 조절
left_link = traitlets.dlink((controller.axes[1], 'value'), (robot.left_motor, 'value'), transform=lambda x: -0.7*x)
right_link = traitlets.dlink((controller.axes[3], 'value'), (robot.right_motor, 'value'), transform=lambda x: -0.7*x)# 버튼 눌렸을 때 사용 방법
def print_hello(change):
print('Hello')
def print_world(change):
print('world')
controller.buttons[1].observe(print_hello, names='value')
controller.buttons[0].observe(print_world, names='value')# 종료해야지만 다른 노트북에서 카메라 사용 가능
camera.stop()
GitHub - Jinsun-Lee/Jetbot
Contribute to Jinsun-Lee/Jetbot development by creating an account on GitHub.
github.com
반응형
'2025 > ROS' 카테고리의 다른 글
| 자율주행 플랫폼 하드웨어 구성 (0) | 2022.05.26 |
|---|---|
| ROS 로봇 프로그래밍 /표윤석, 조한철, 정려운, 임태훈 (0) | 2022.05.26 |
| E: Sub-process /usr/bin/dpkg returned an error code (2) (0) | 2022.05.06 |
| [Jetbot] 장애물 충돌 회피와 차선 인식 (0) | 2022.04.20 |
| [Jetbot] 세팅 (0) | 2022.04.20 |
'2025/ROS' Related Articles
more




Comments