Divide and Conquer
ROS 로봇 프로그래밍 /표윤석, 조한철, 정려운, 임태훈 본문
728x90
더보기



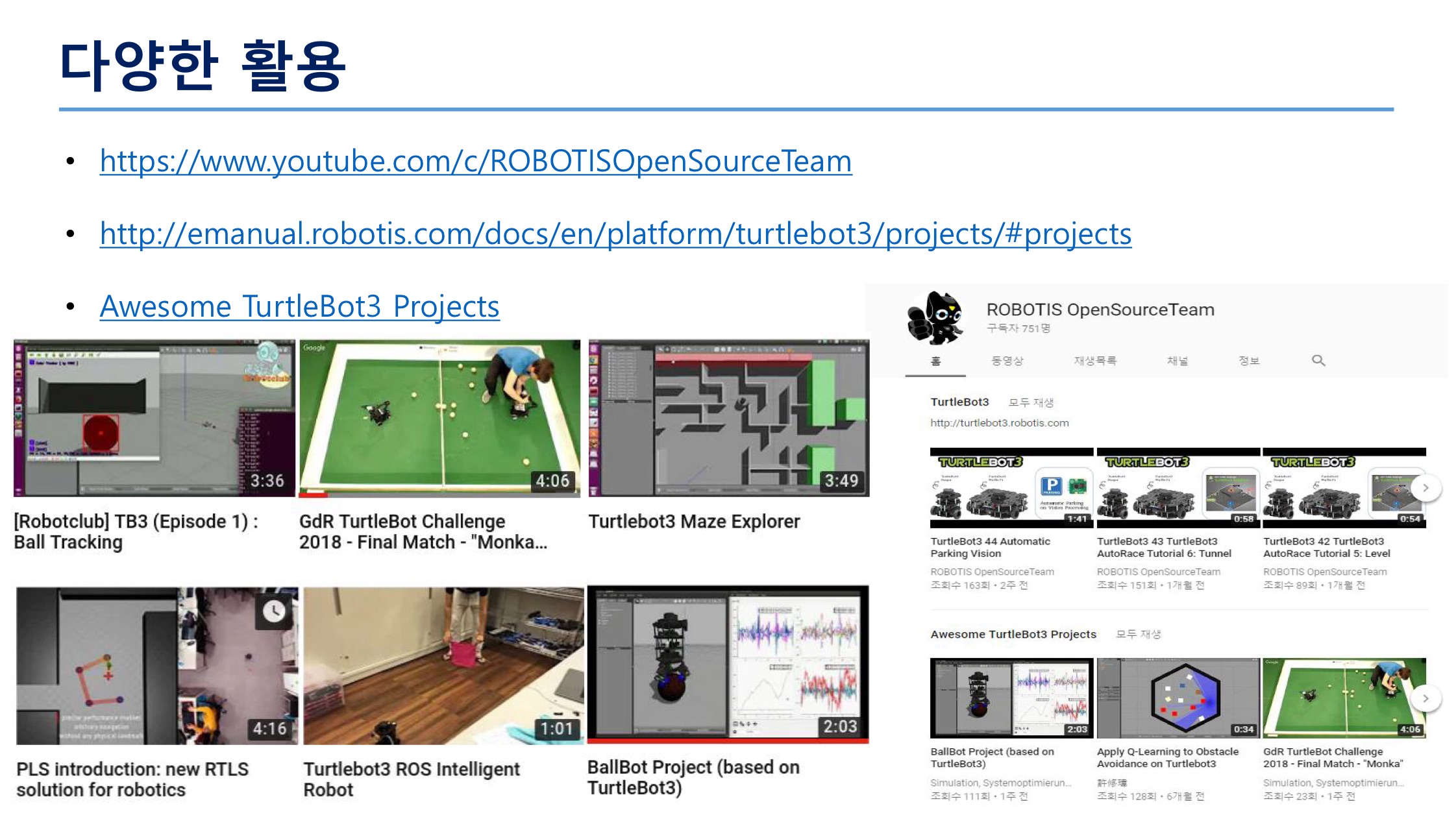
온라인 강의 https://www.youtube.com/playlist?list=PLRG6WP3c31_VIFtFAxSke2NG_DumVZPgw
pdf 공개 https://github.com/robotpilot/ros-seminar
ROS2 책이 나오면서 ROS1 책을 공유해 주셨습니다 감사합니다 열심히 공부하겠습니다
더보기
ROS2


메모
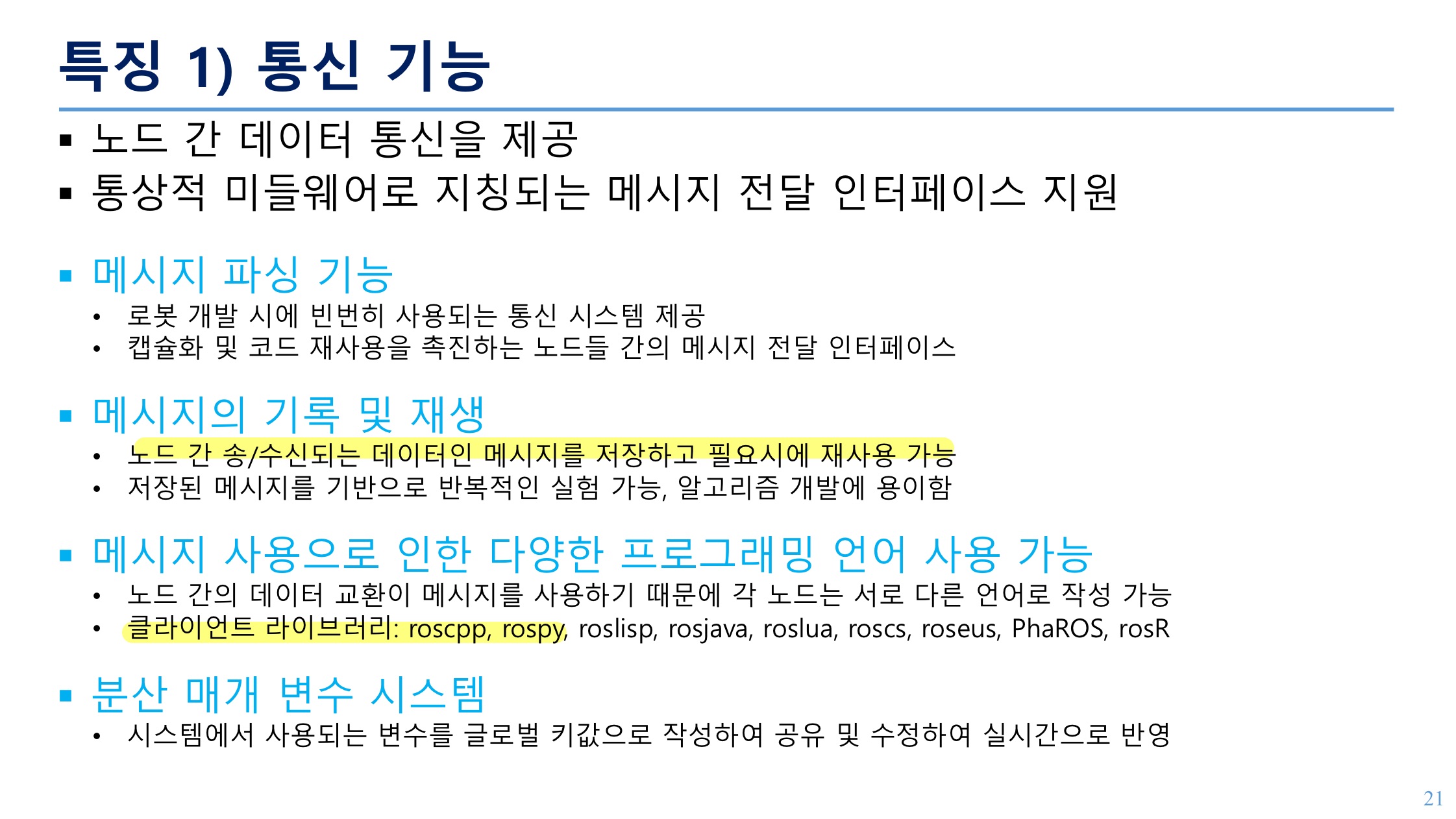
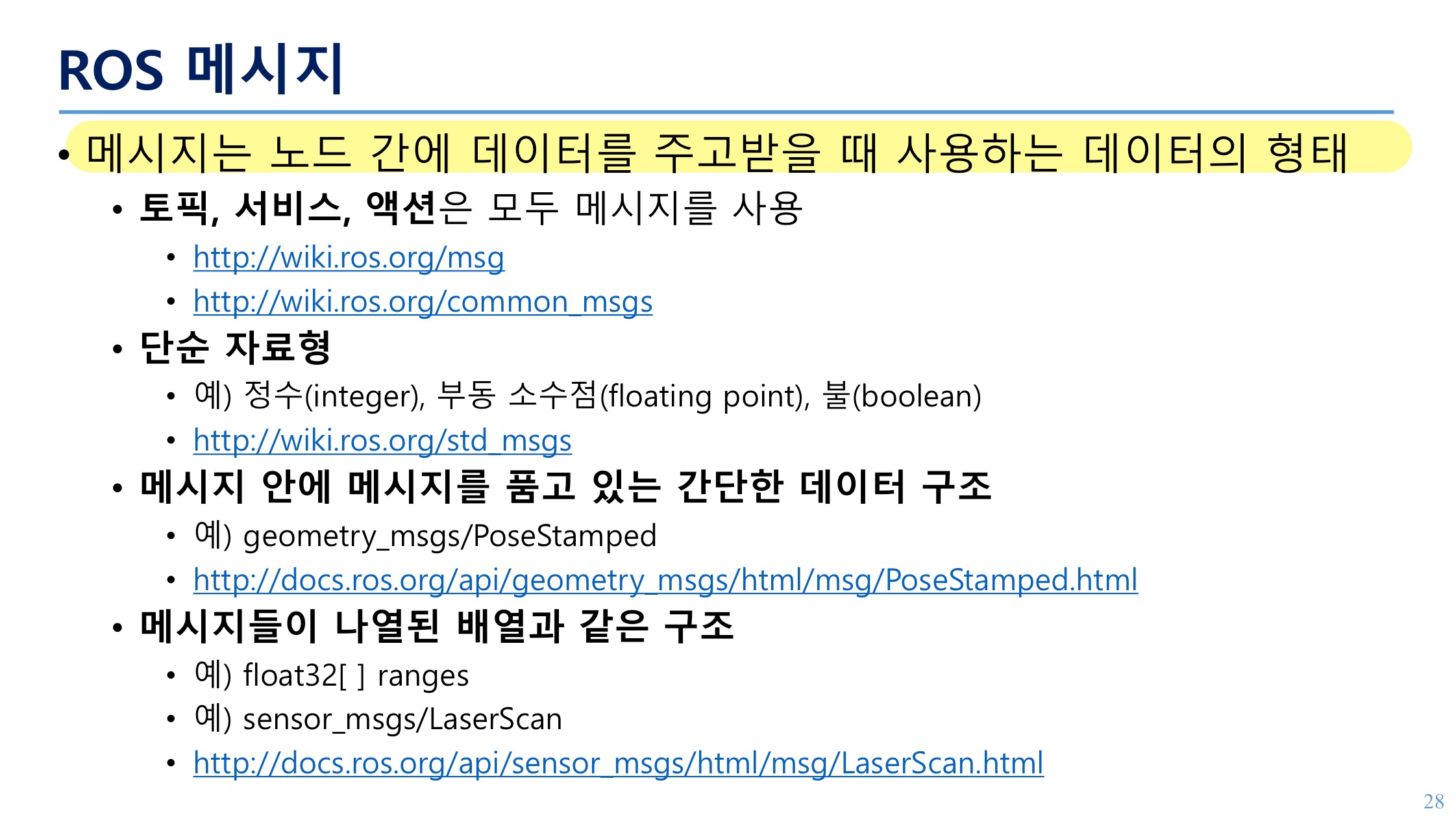
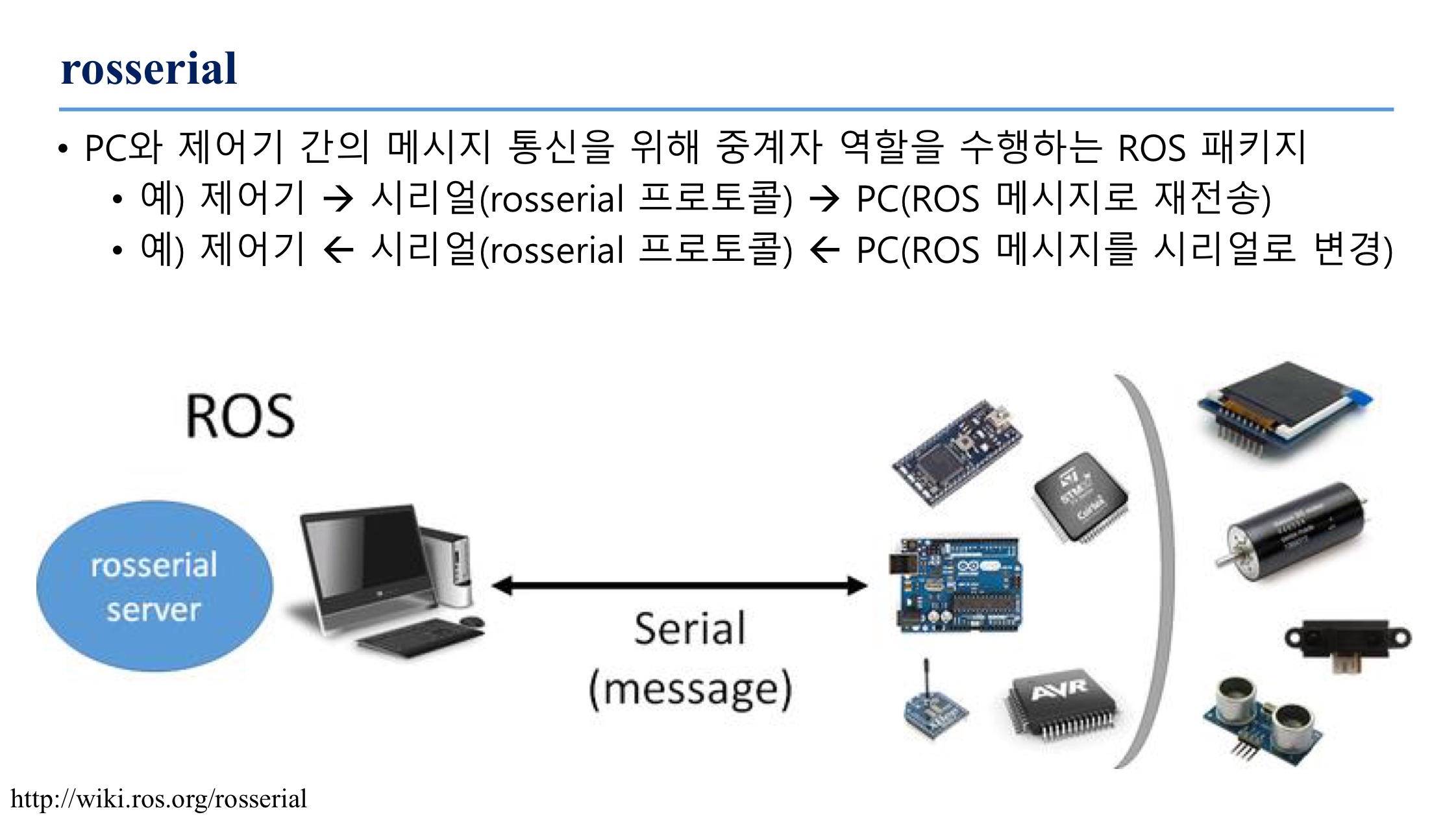
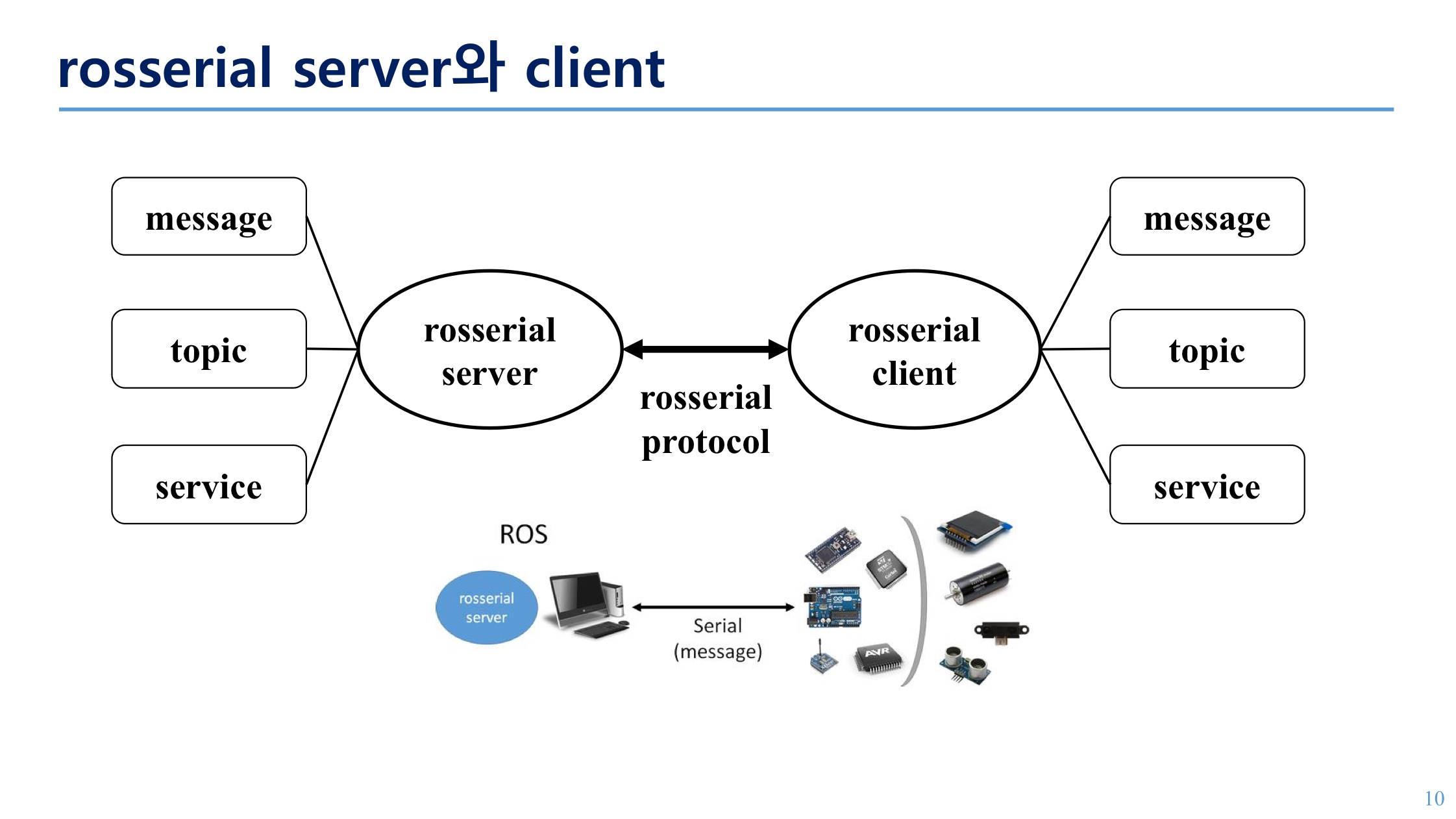
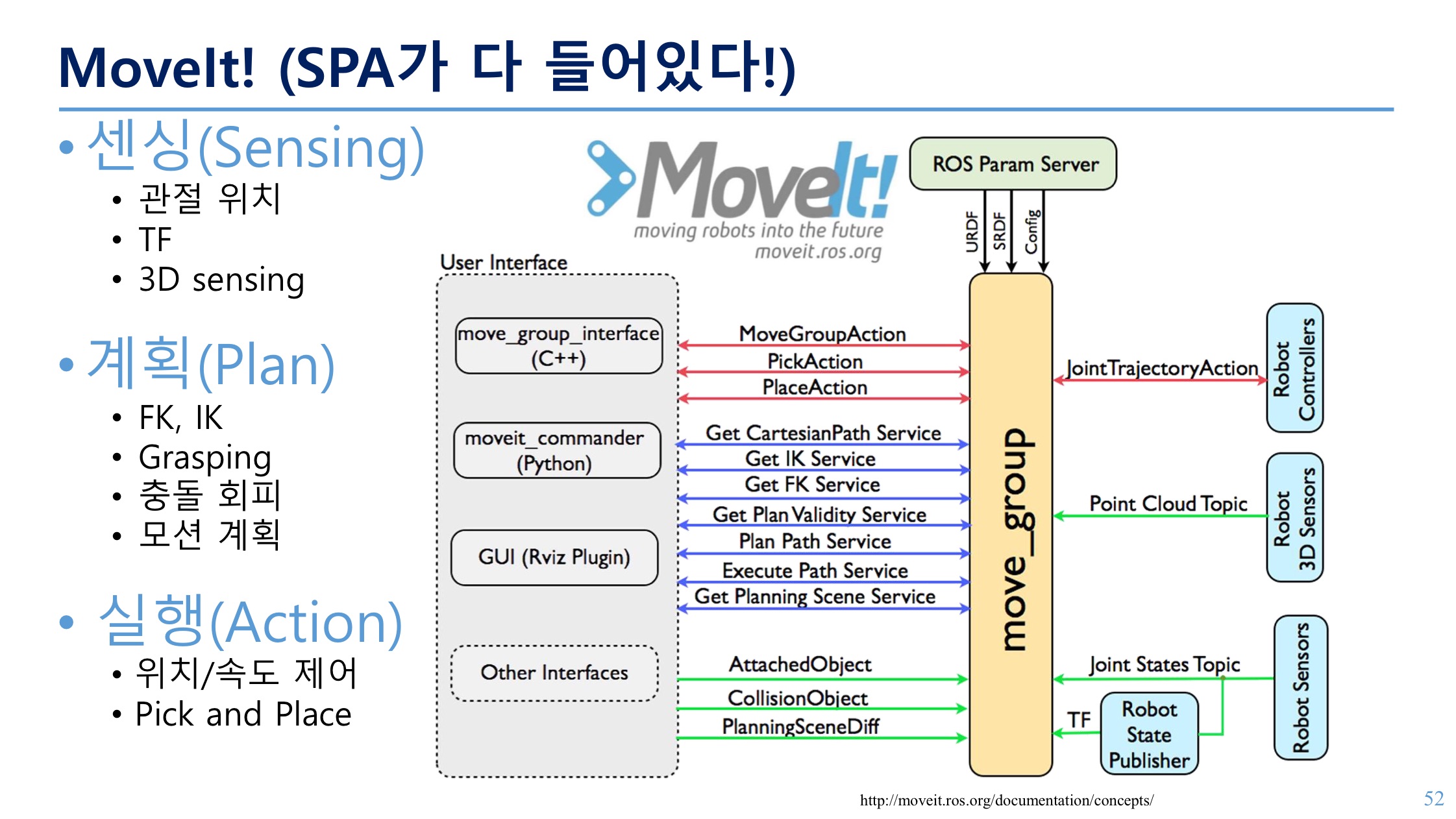
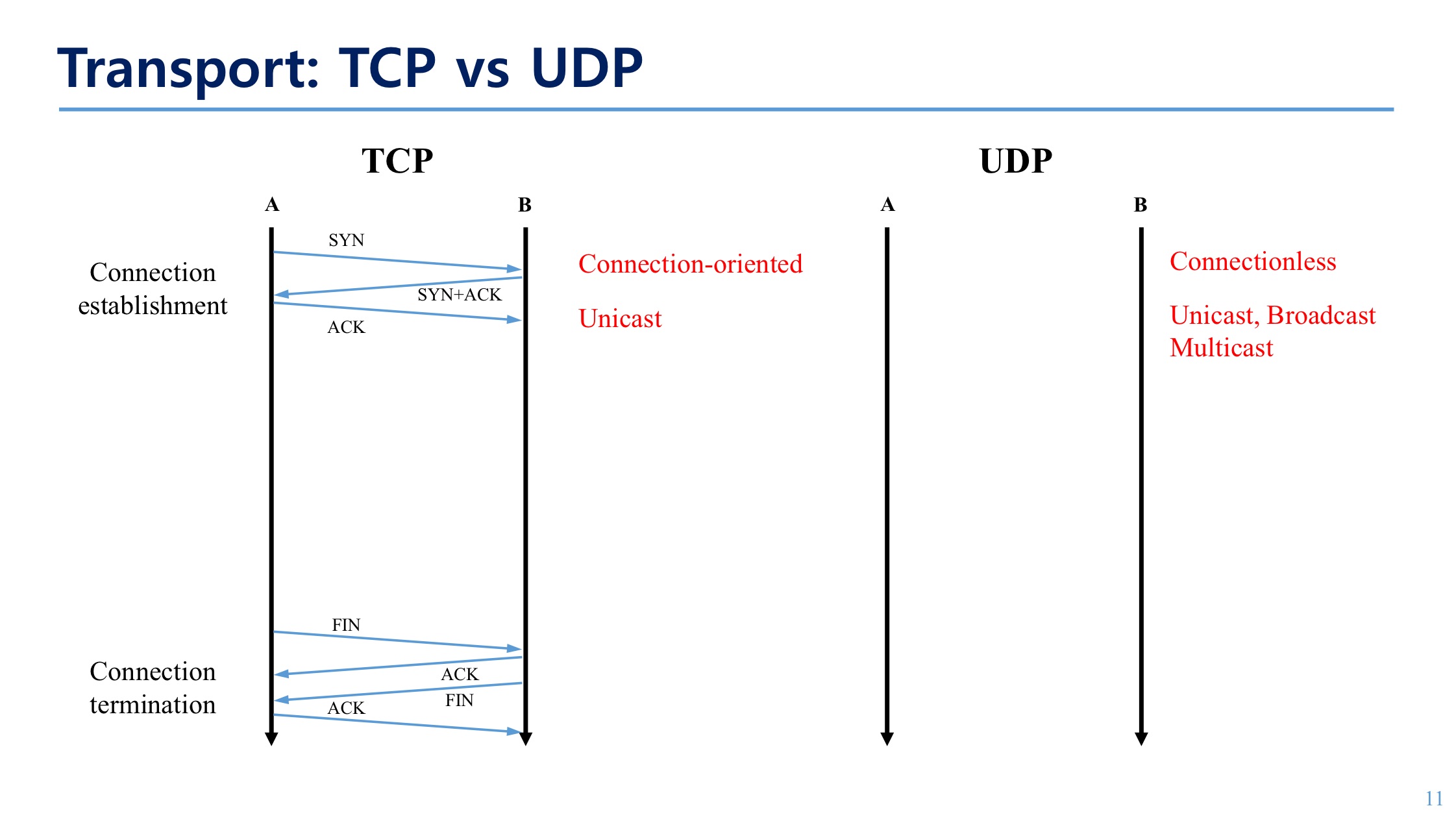
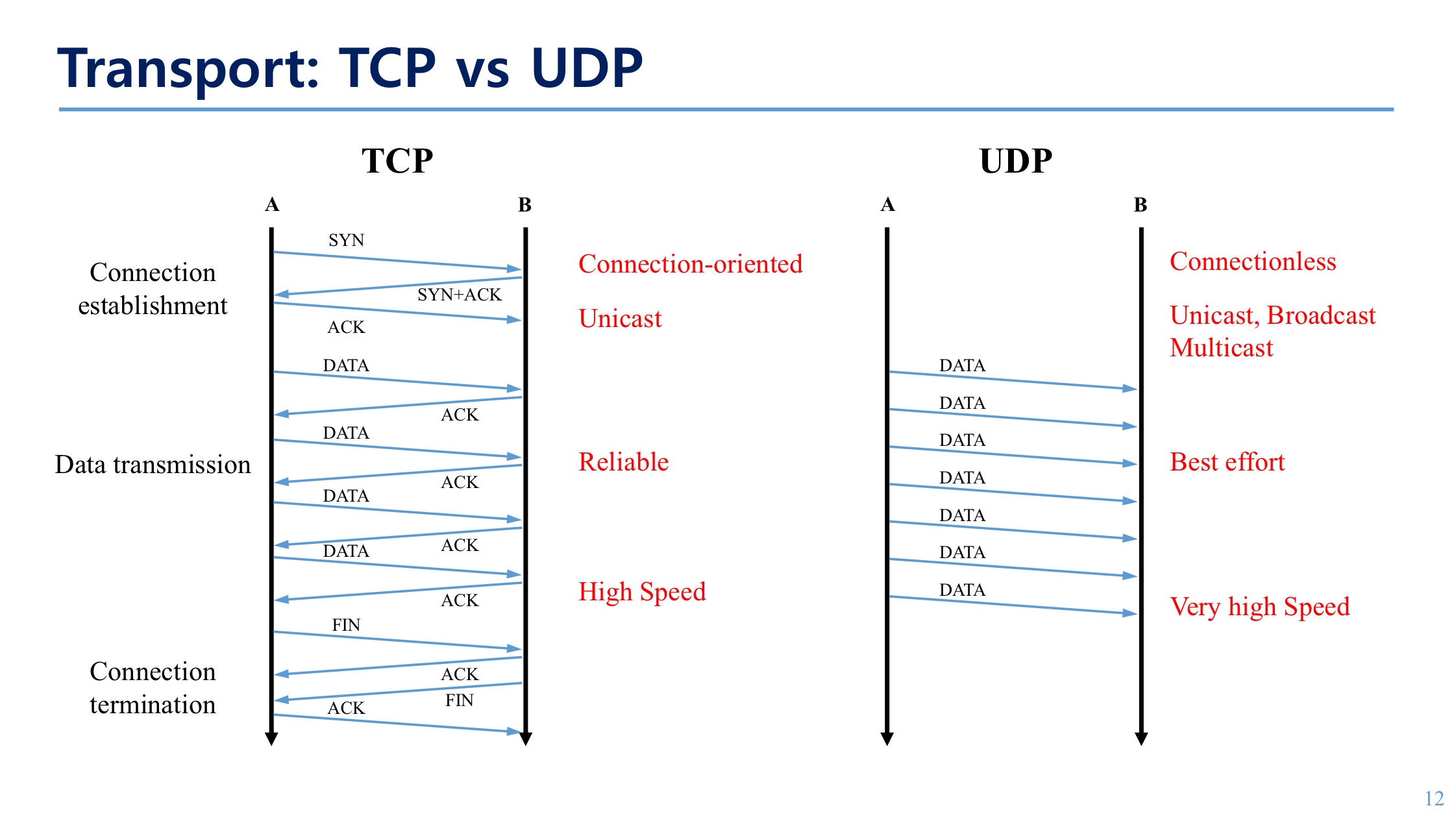
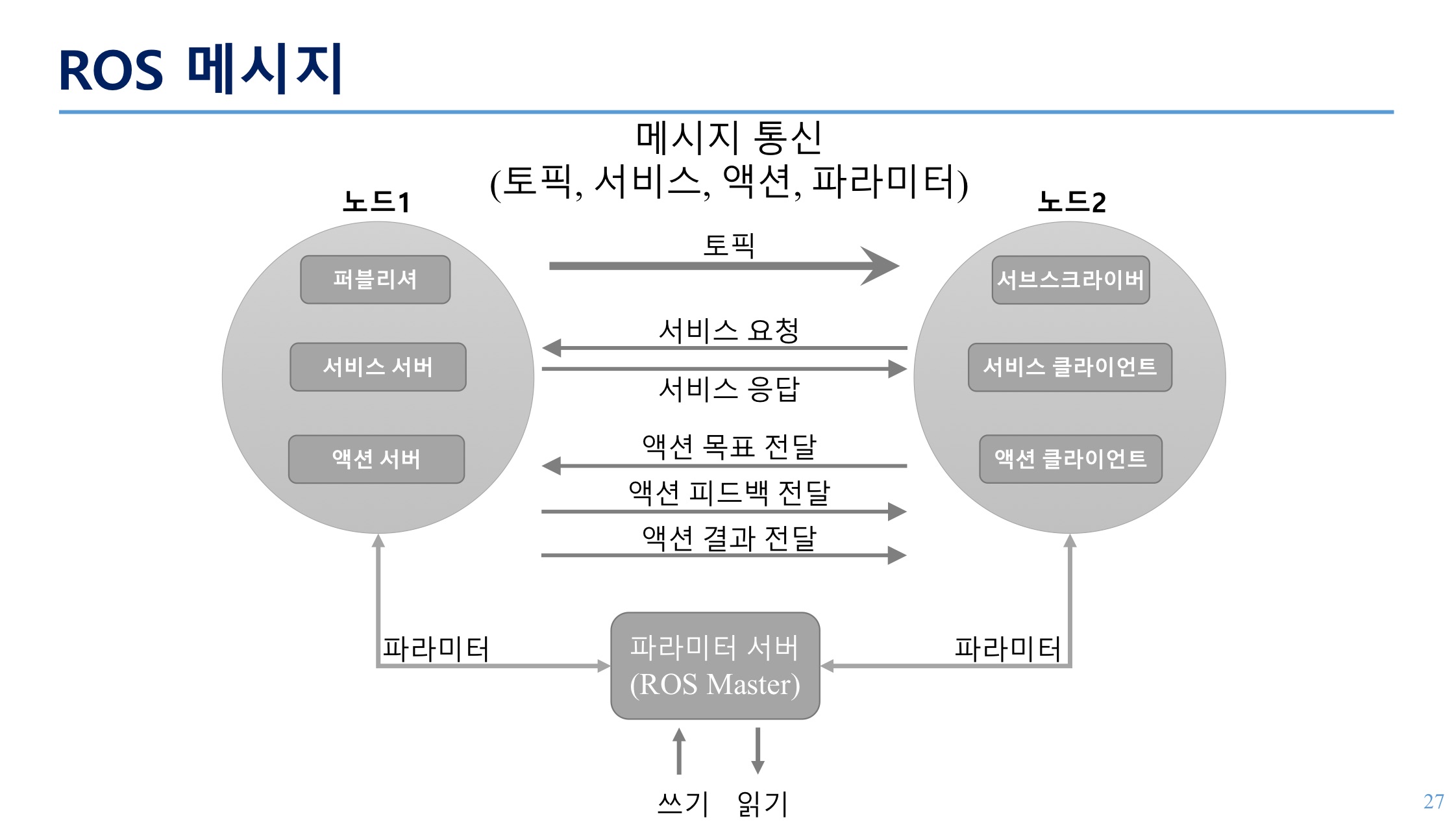
- 노드는 메시지를 통해 데이터를 주고받는다 메시지는 int, float, point와 같은 변수 형태이다 TCPROS, UDPROS 방식으로 통신
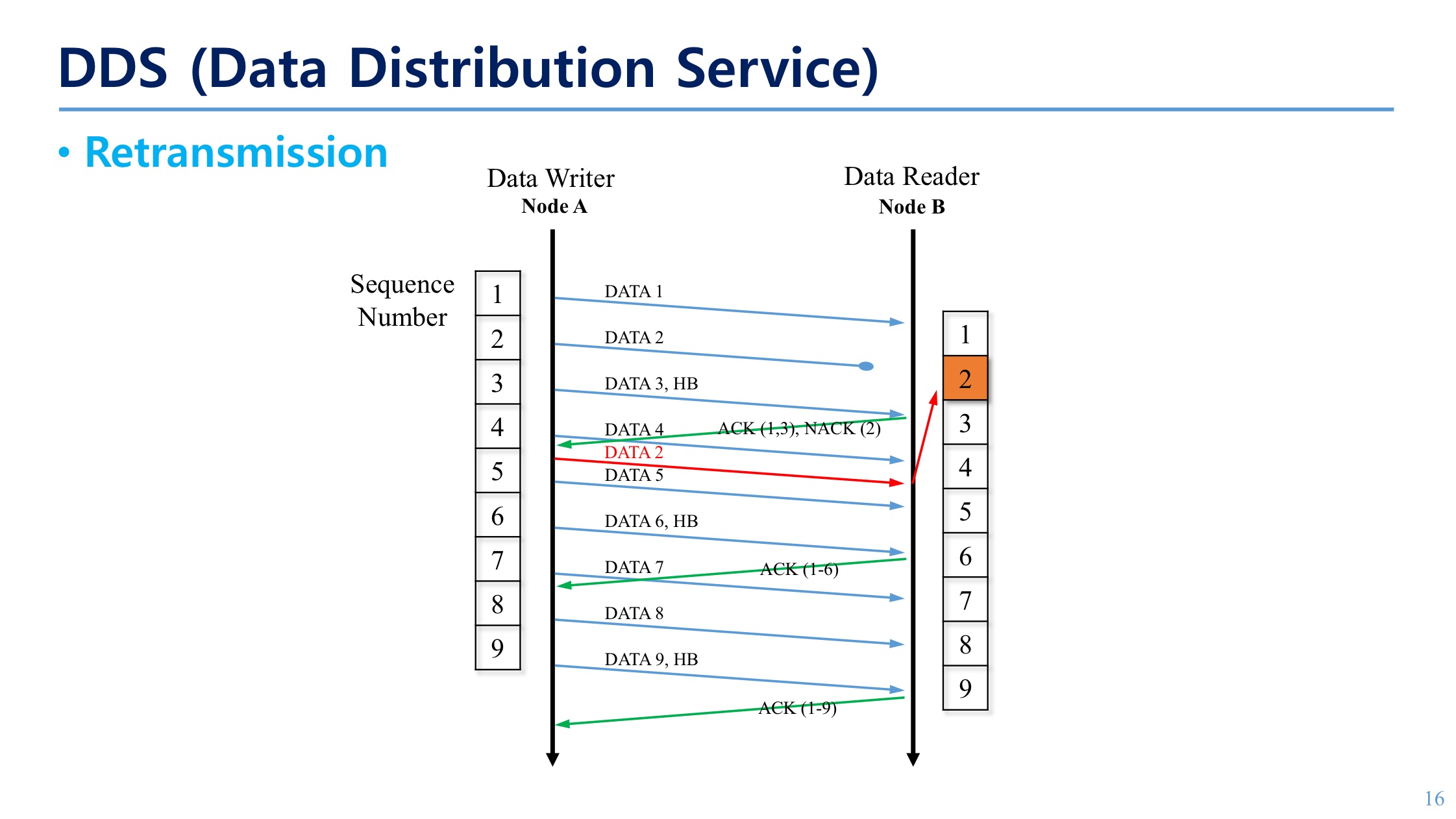
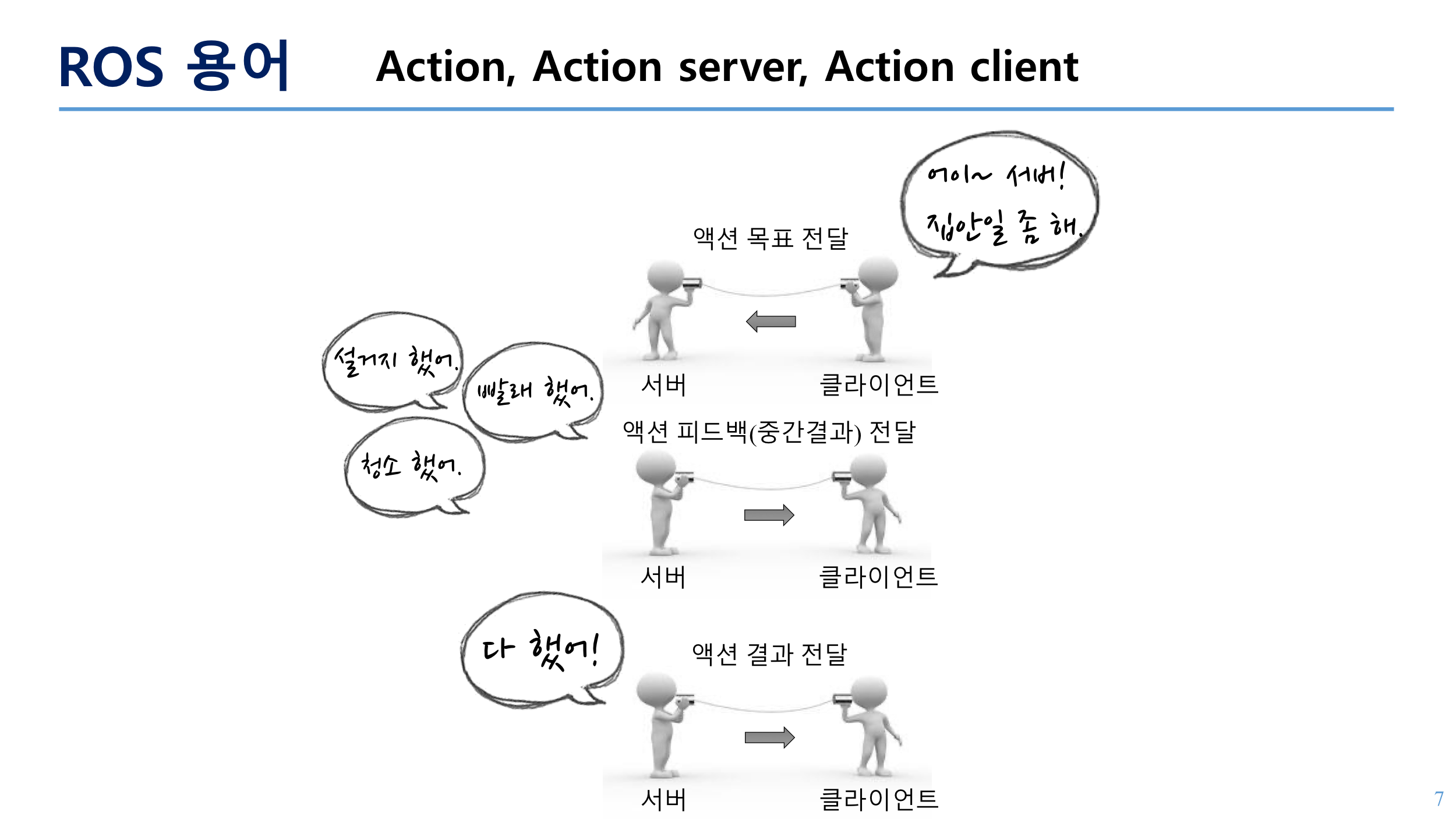
- 액션 클라이언트는 목표를 출력하고 액션 서버로부터 결과 및 피드백을 입력으로 받는 메시지 통신의 클라이언트 역할을 말하는데 액션 서버에게 목표를 전달하고 결과 및 피드백을 수신받아 다음 지시를 내리거나 목표를 취소하는 역할을 한다
- 파라미터가 윈도우 프로그램에서의 *.ini 설정파일과 같다는데 모르겠네 디폴트로 설정값들이 지정되어 있고 모터 속도나 명령어들의 최대 최소값들을 지정 가능
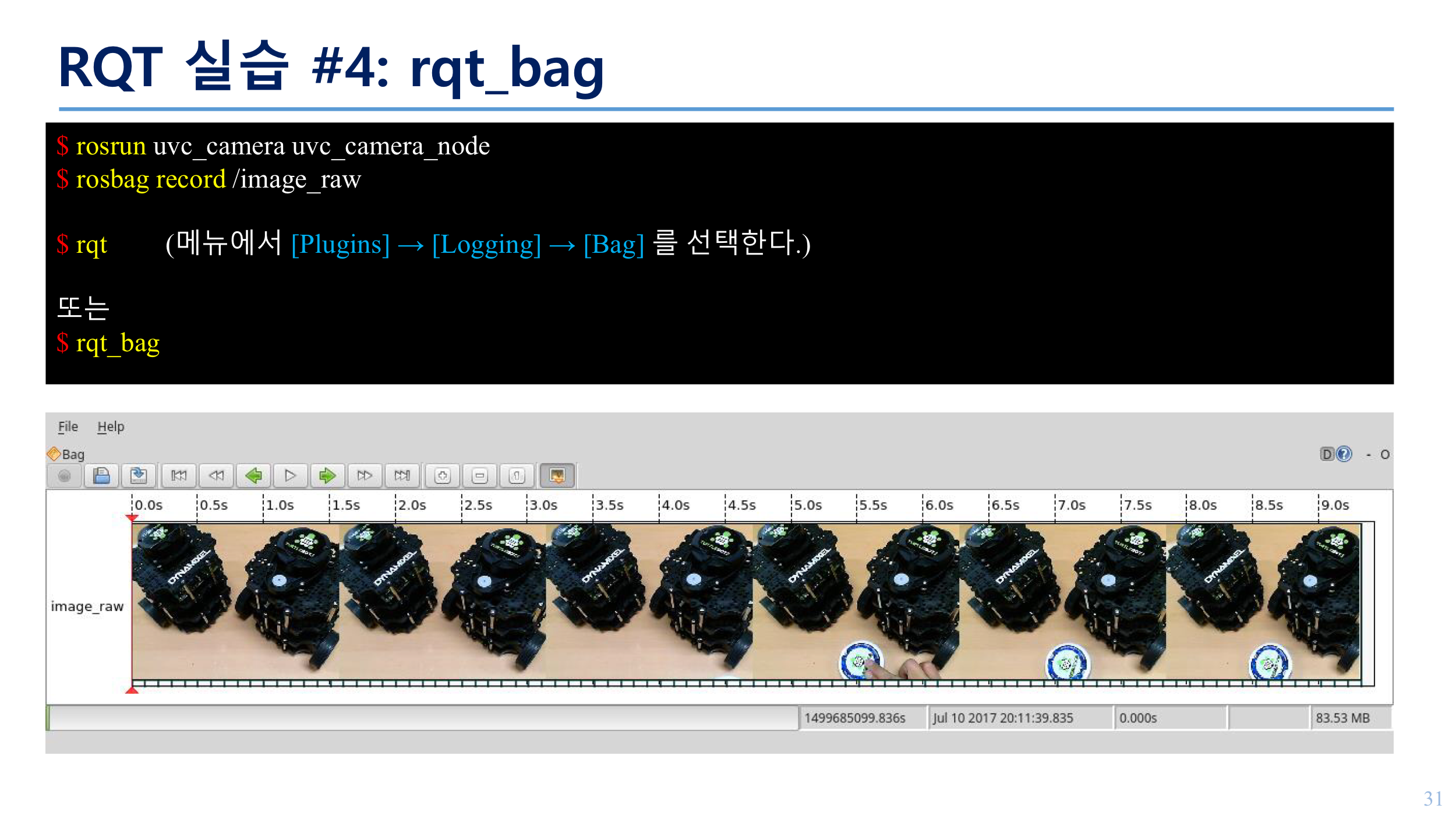
- bag은 메시지의 데이터를 저장할 때 파일의 포맷
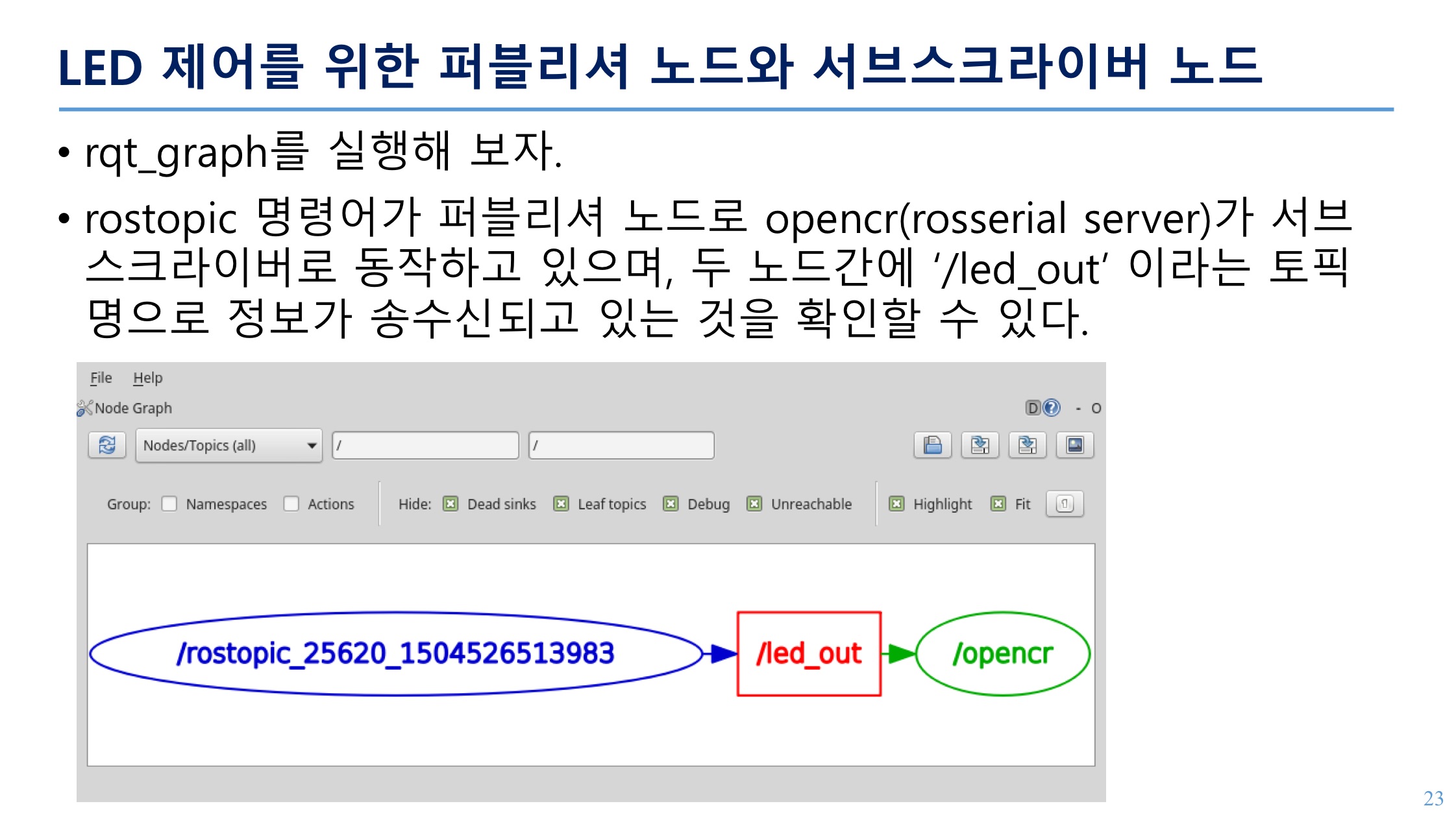
- 토픽은 비동기 단방향
서비스 동기 양(일회, 네트워크 부하 적음, 현재 시각 요청 등)
액션 비동기 양(서비스에 피드백 추가, 오히려 토픽과 유사)
서비스와 액션의 차이는 요청 처리 후 응답이 길면 액션 순간적이면 서비스 - 토픽은 단방향 통신이며 한 번의 접속으로 연속적인 멤시지 송수신이 가능하기 때문에 센서 데이터에 적합
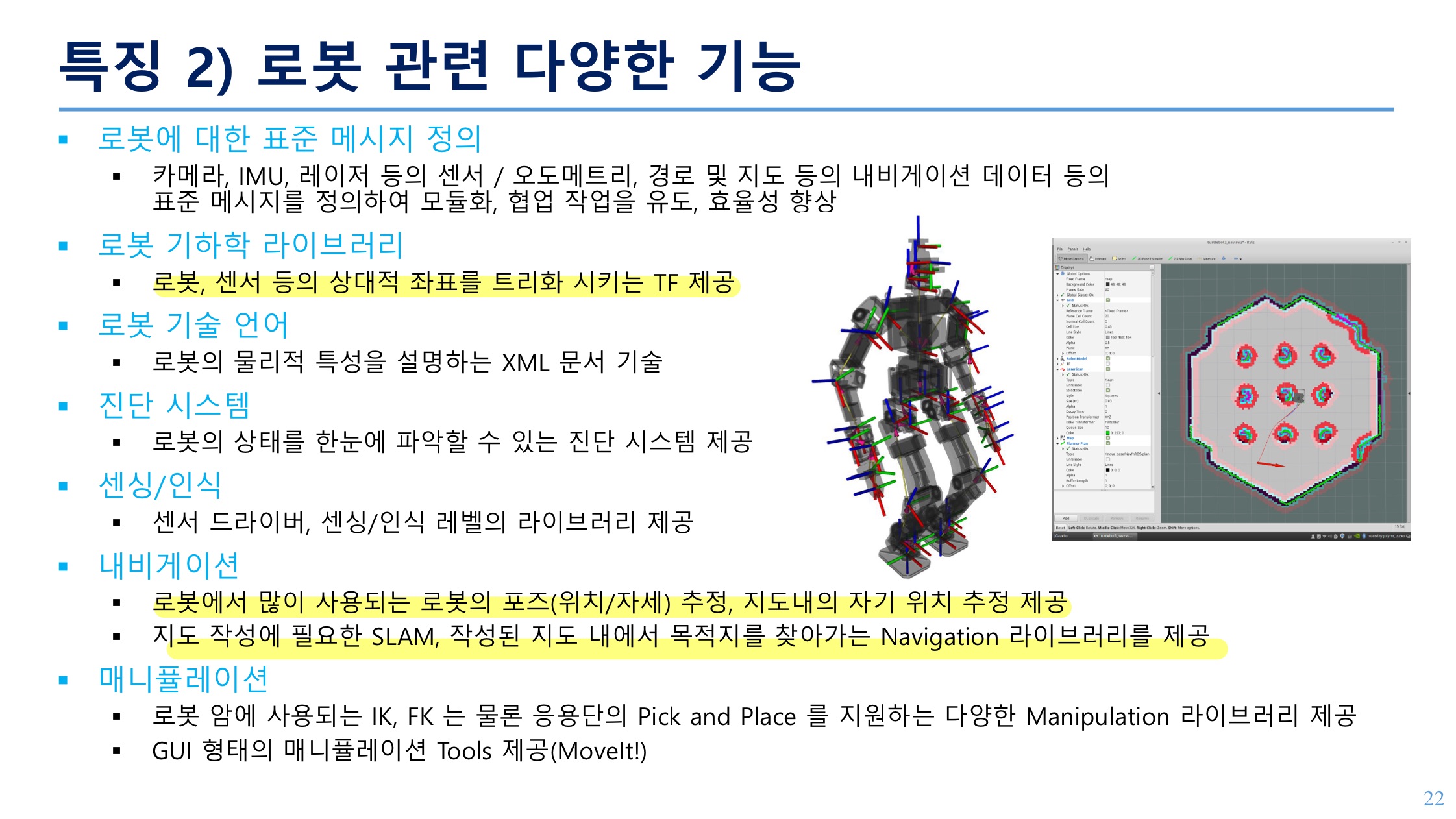
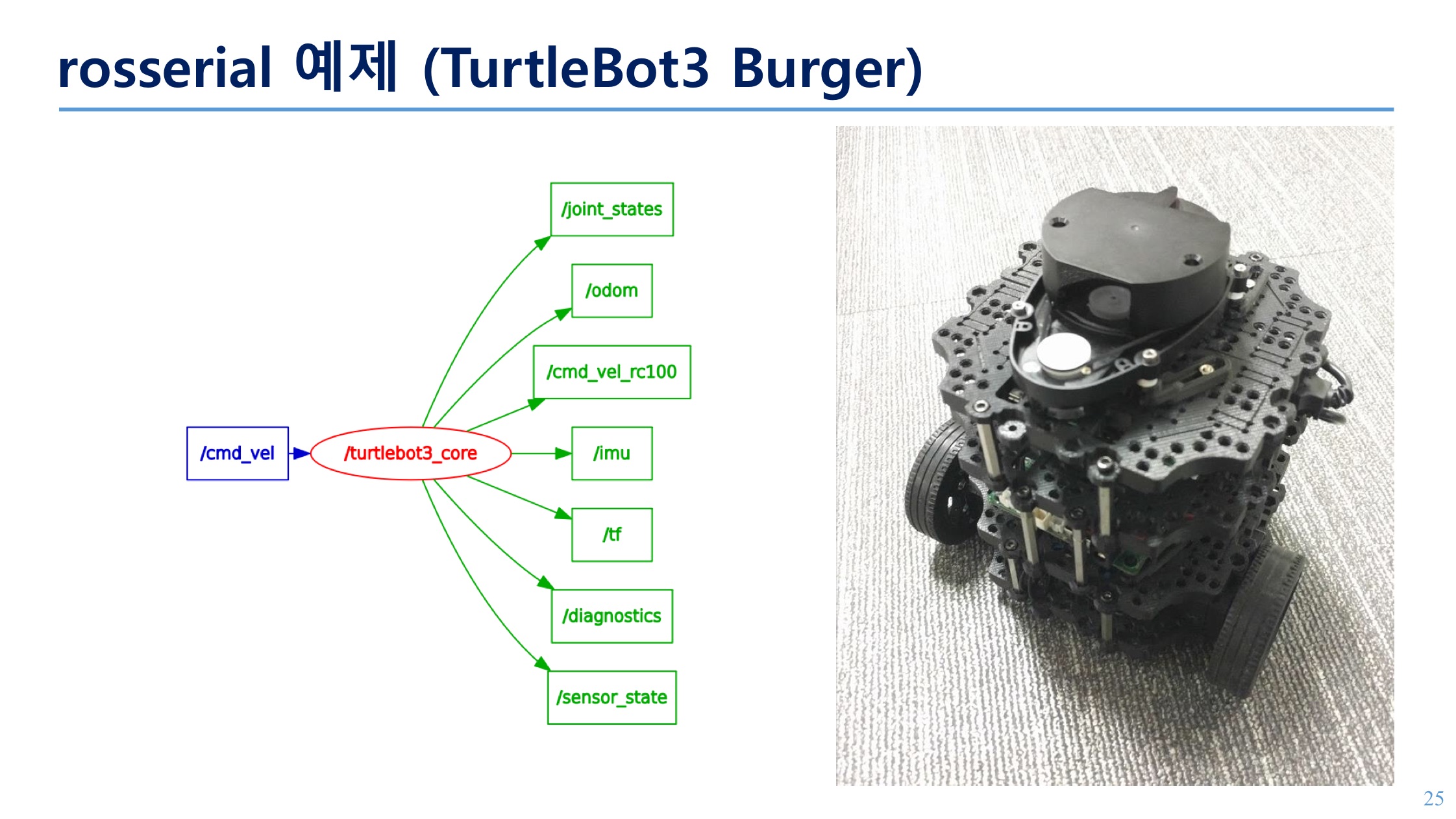
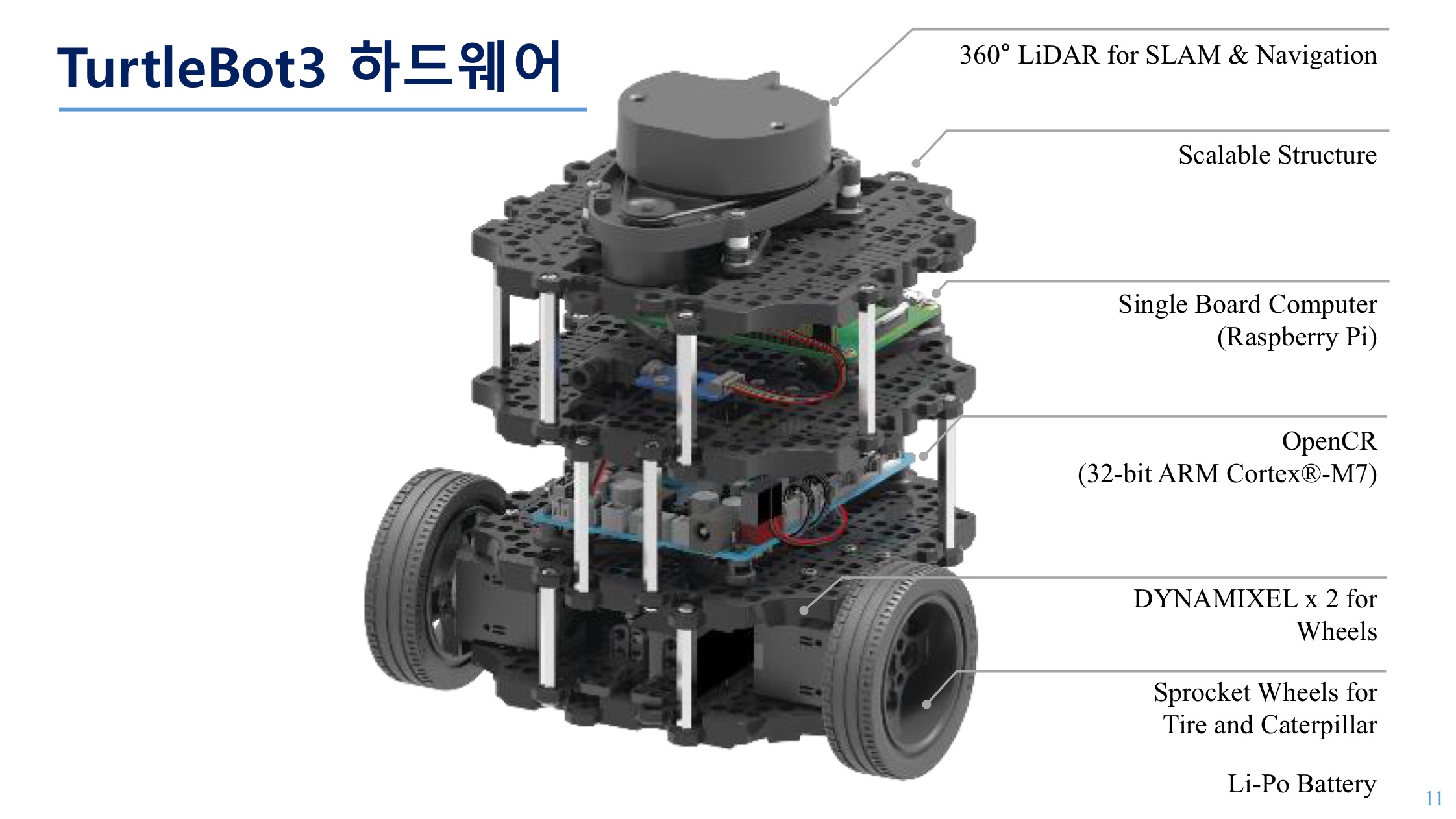
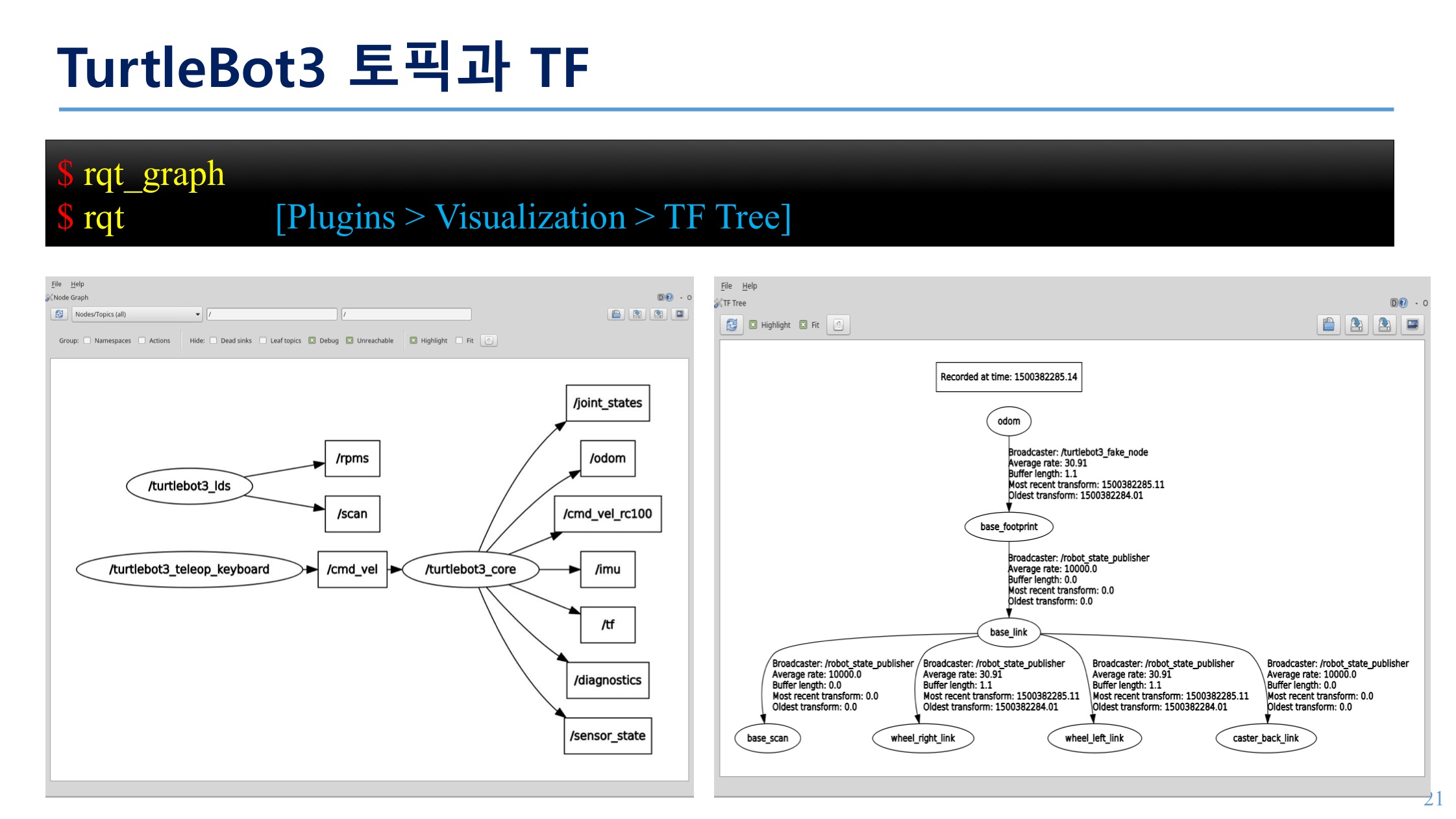
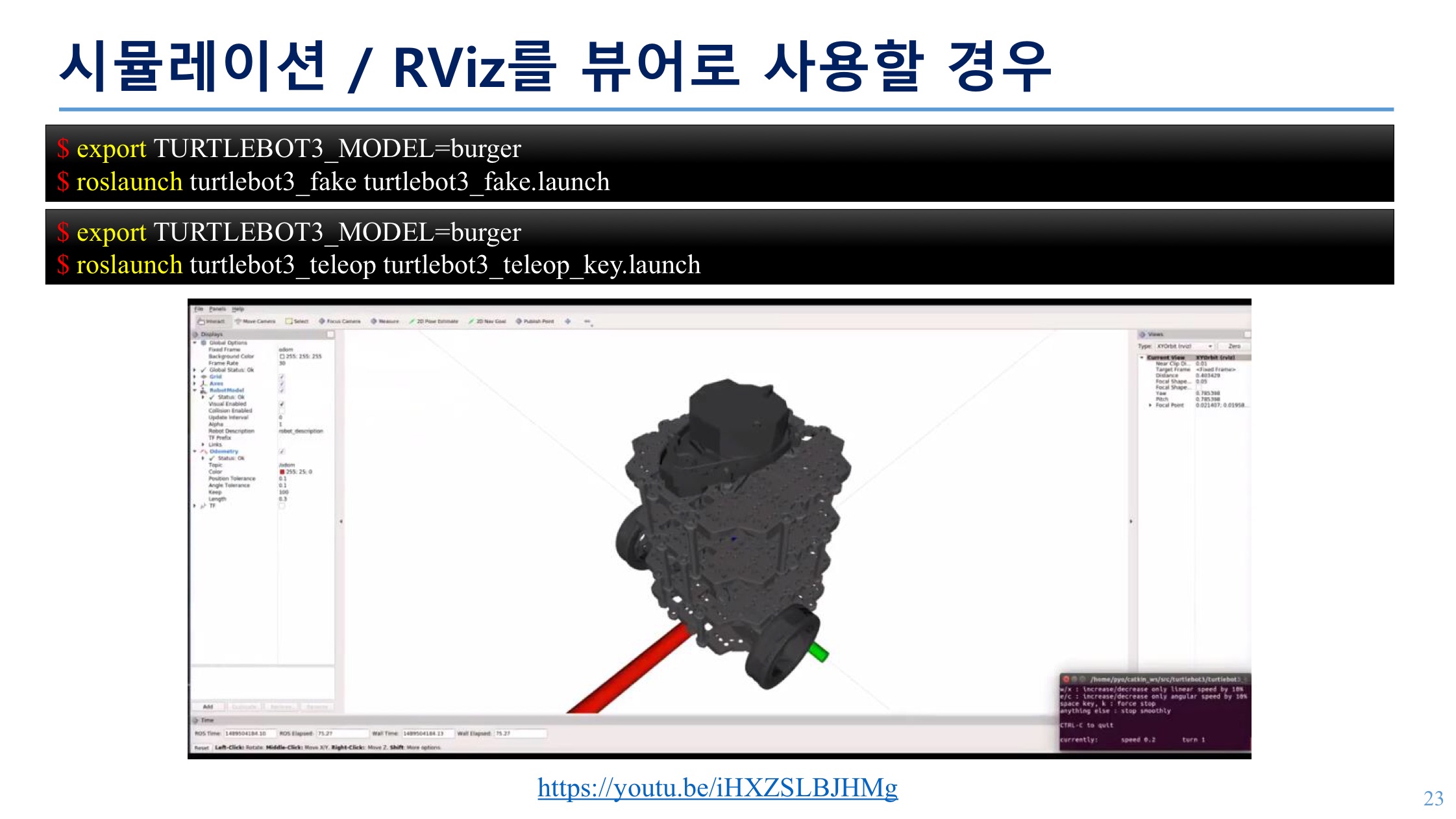
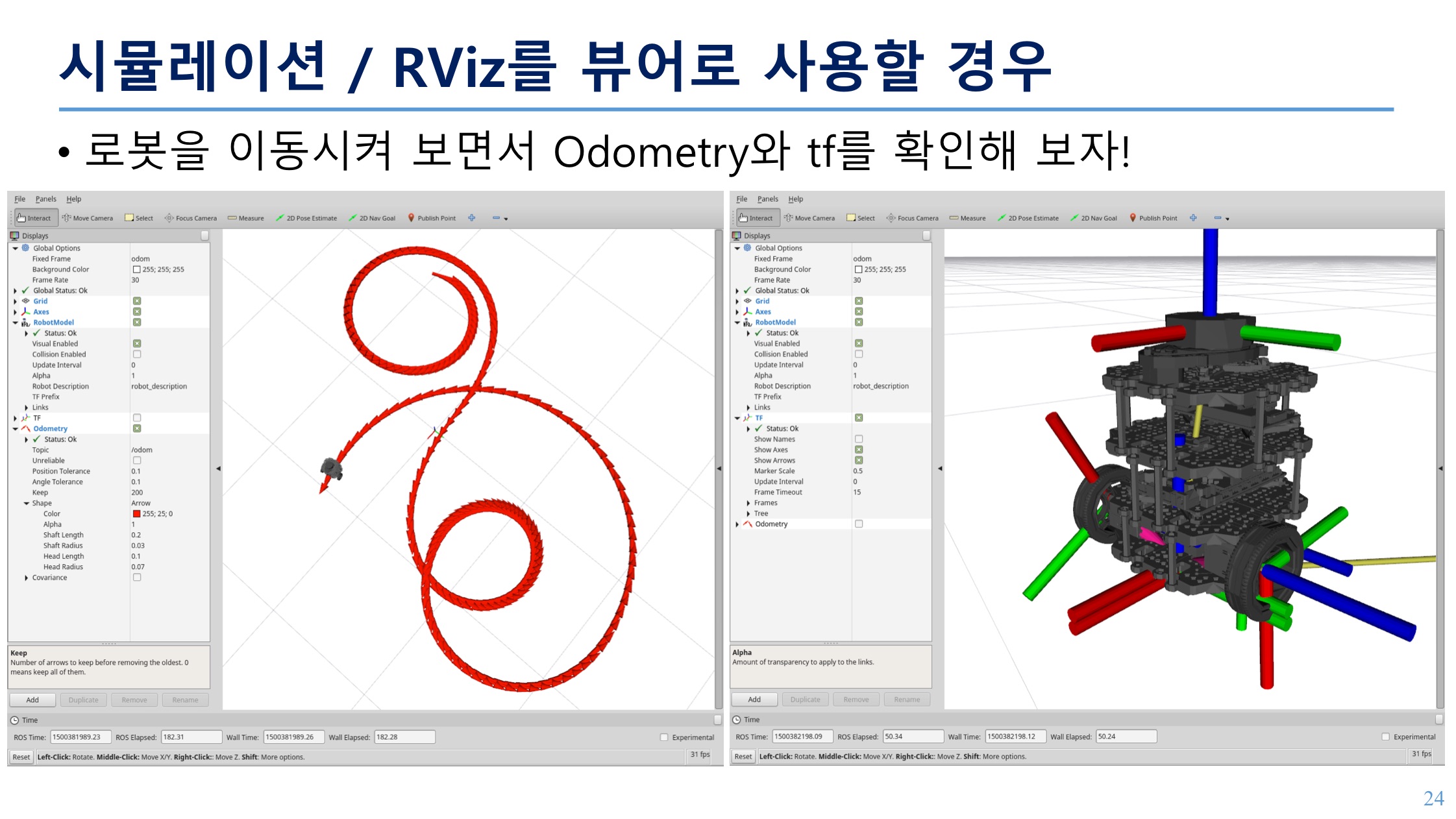
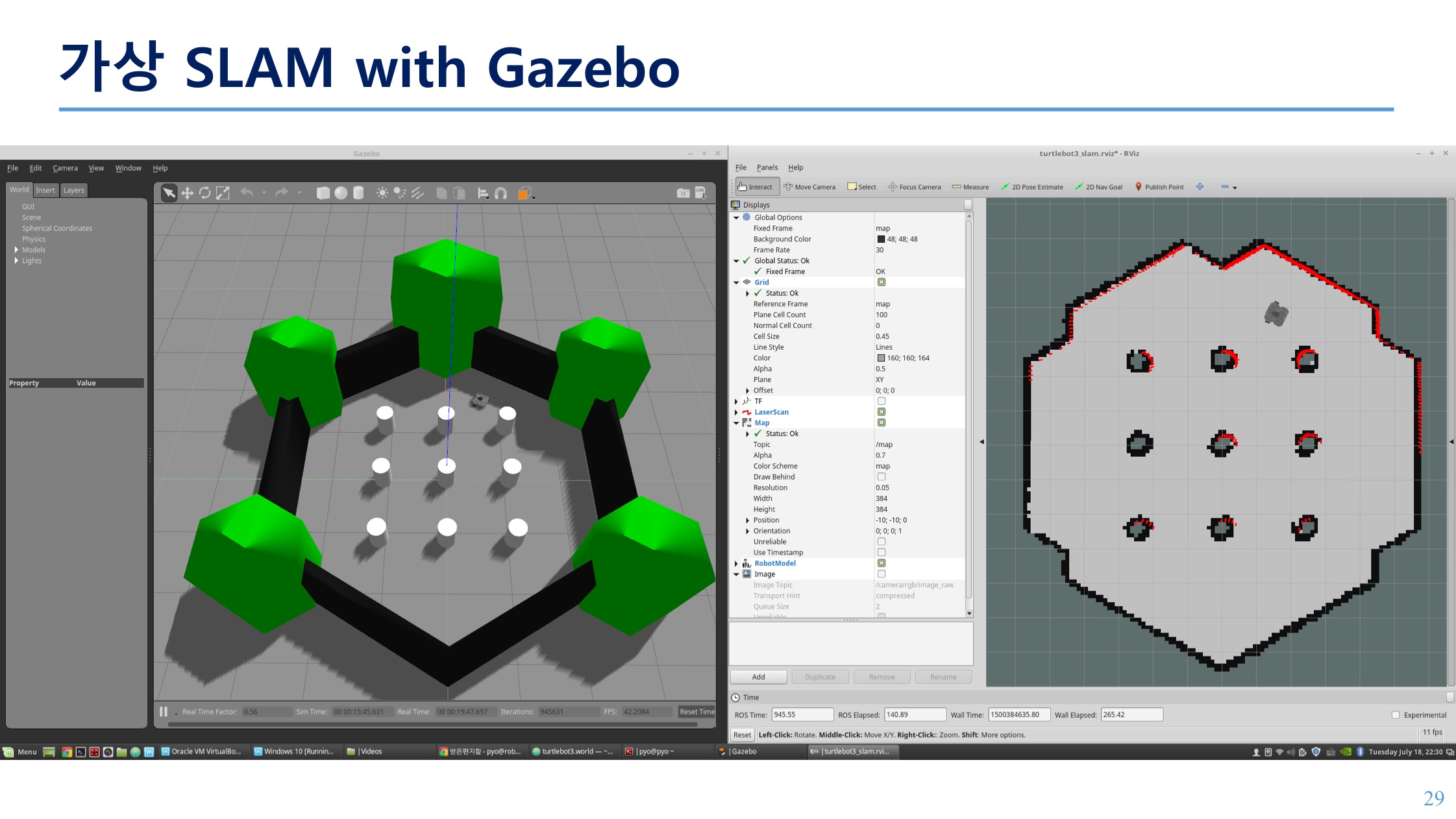
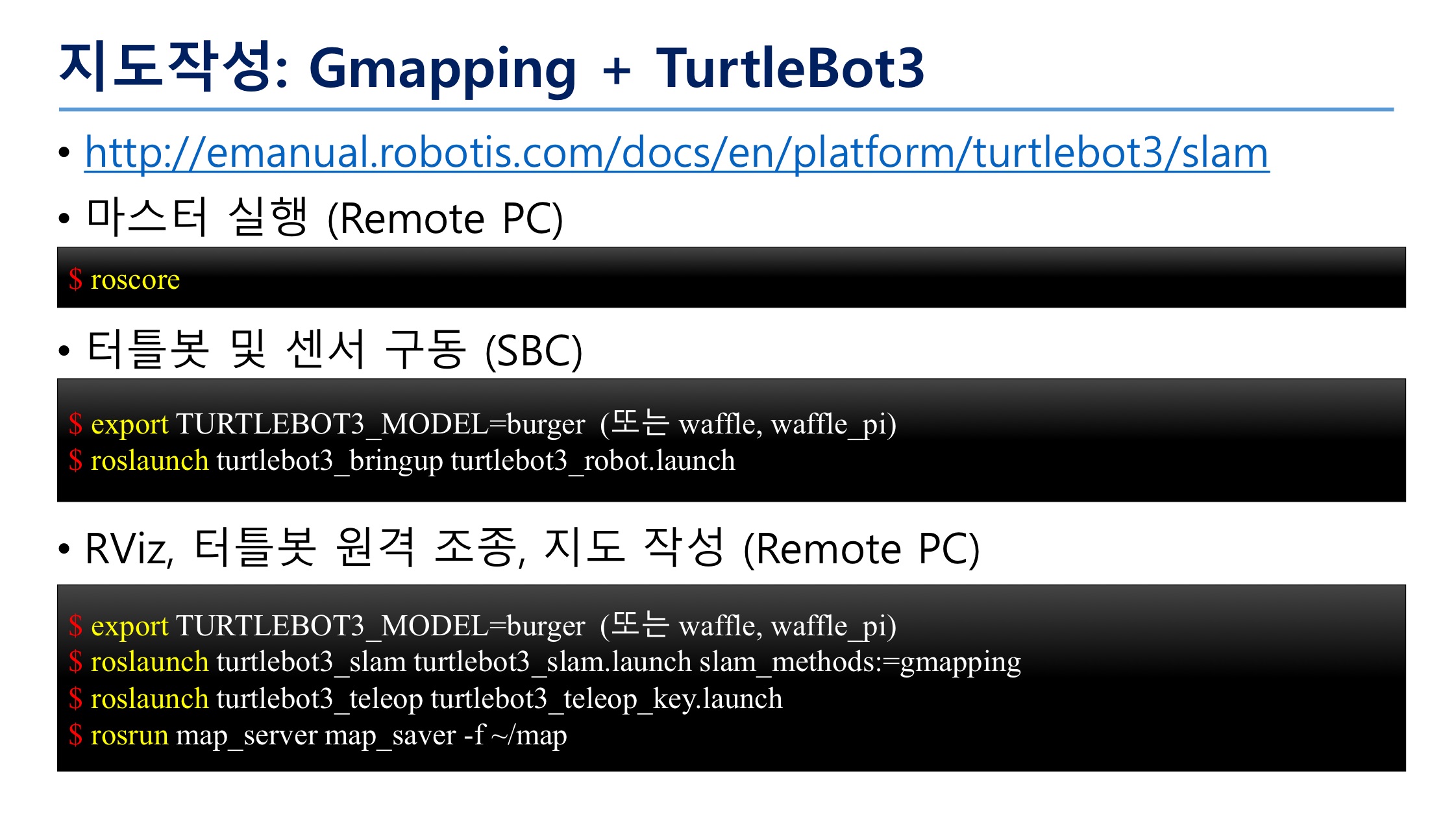
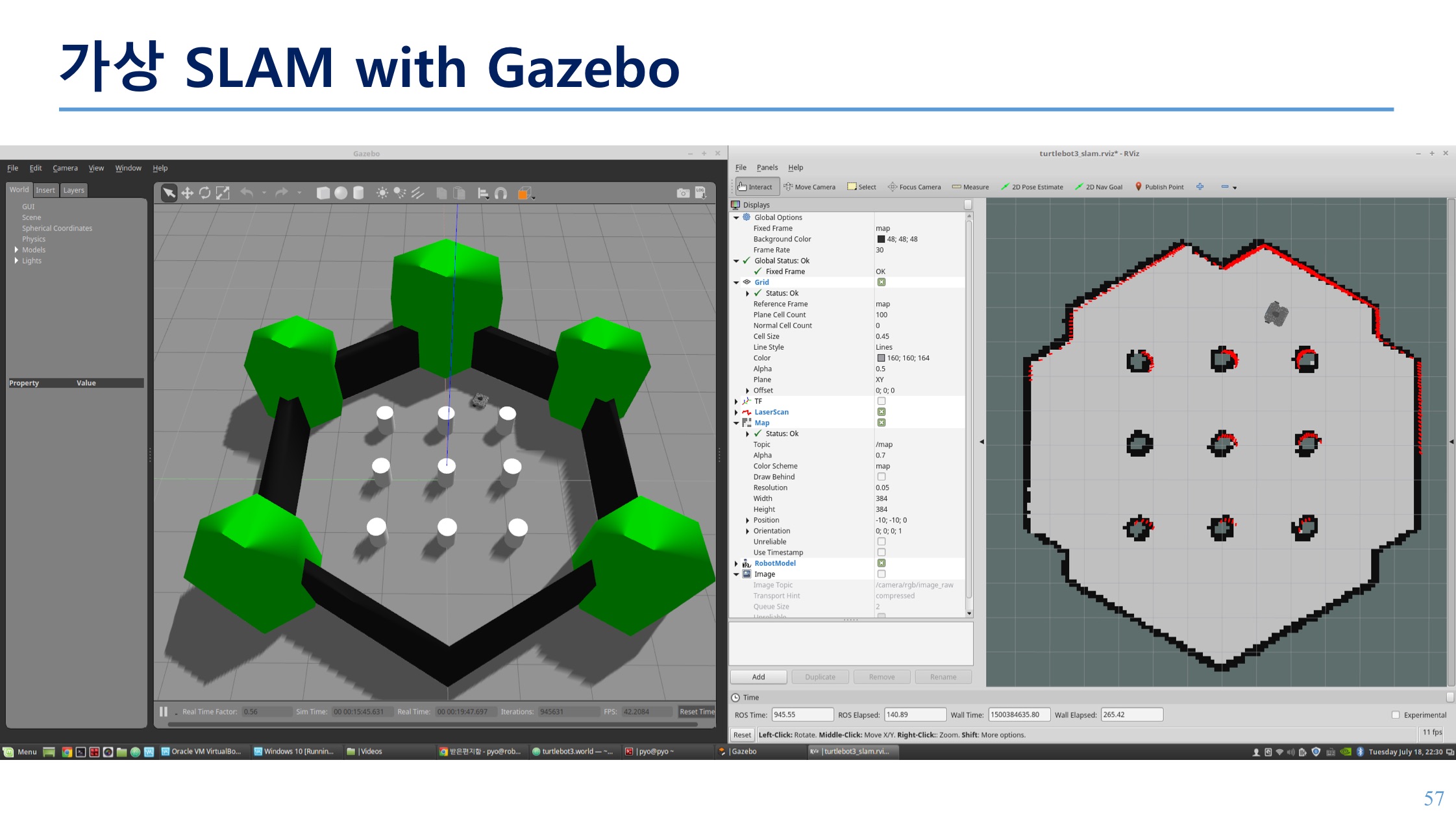
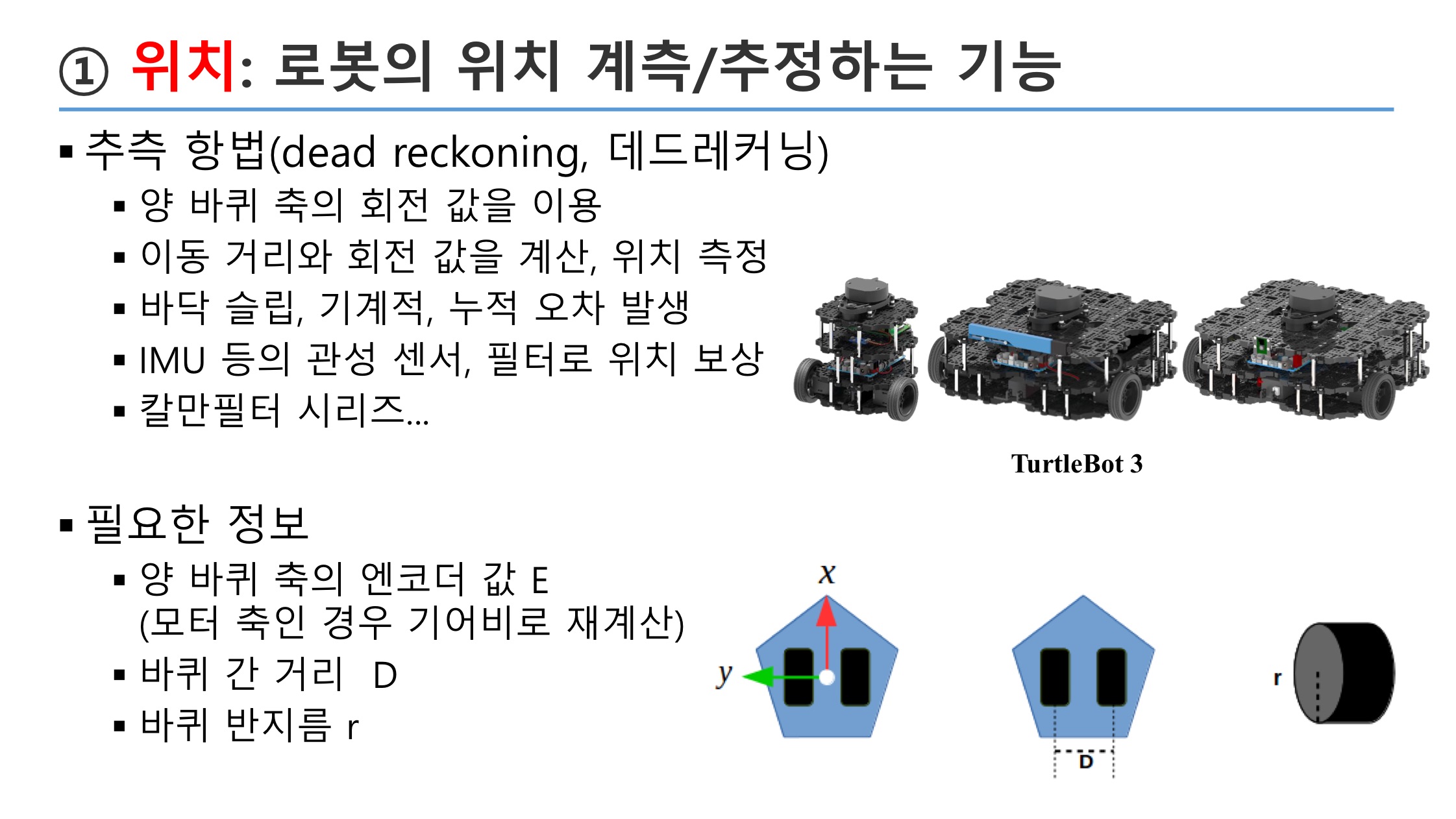
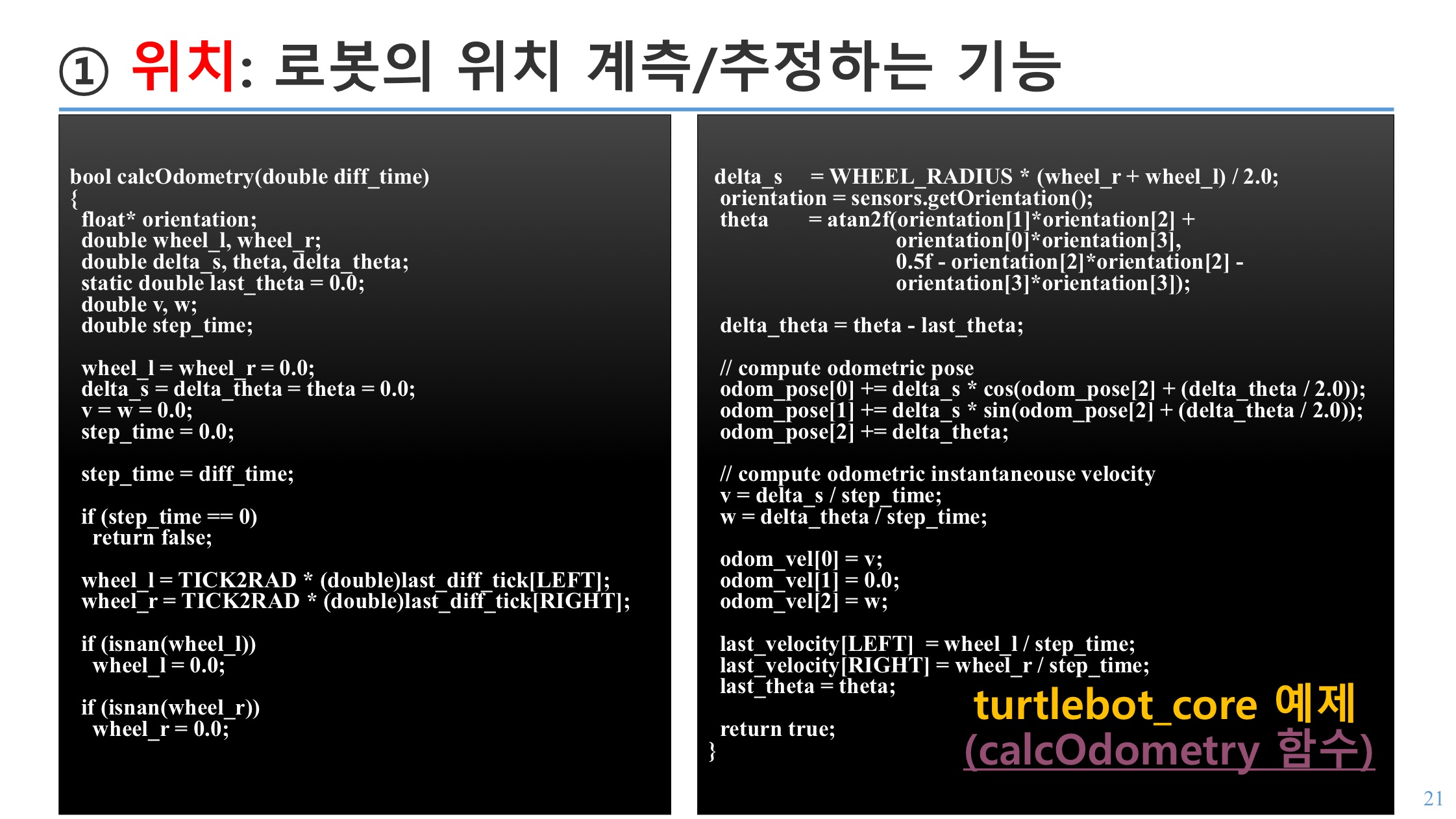
- 모바일로 로봇의 양바퀴의 엔코더값을 계산하여 로봇의 현재 위치인 오도메트리 odometry 정보를 생성
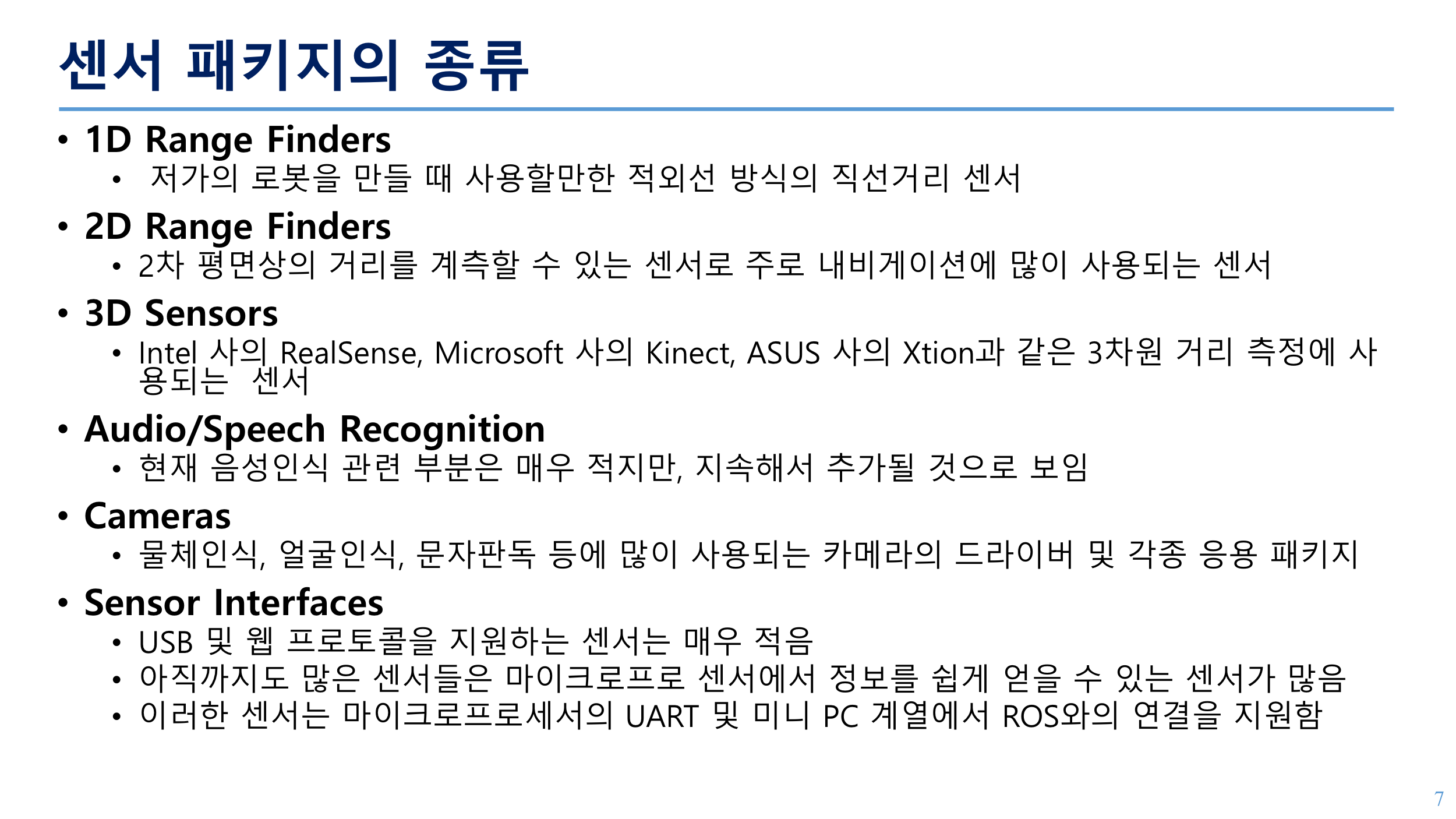
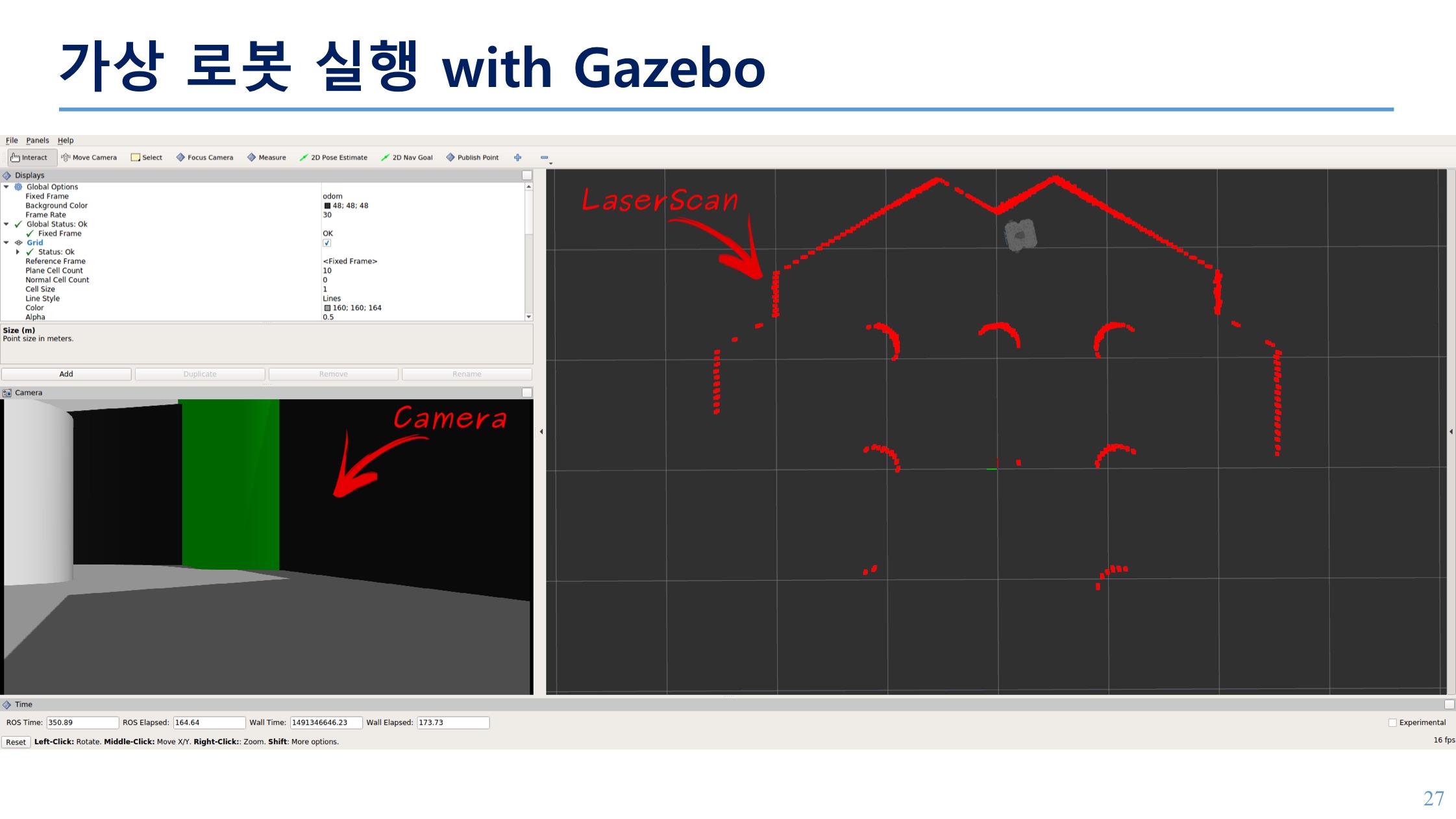
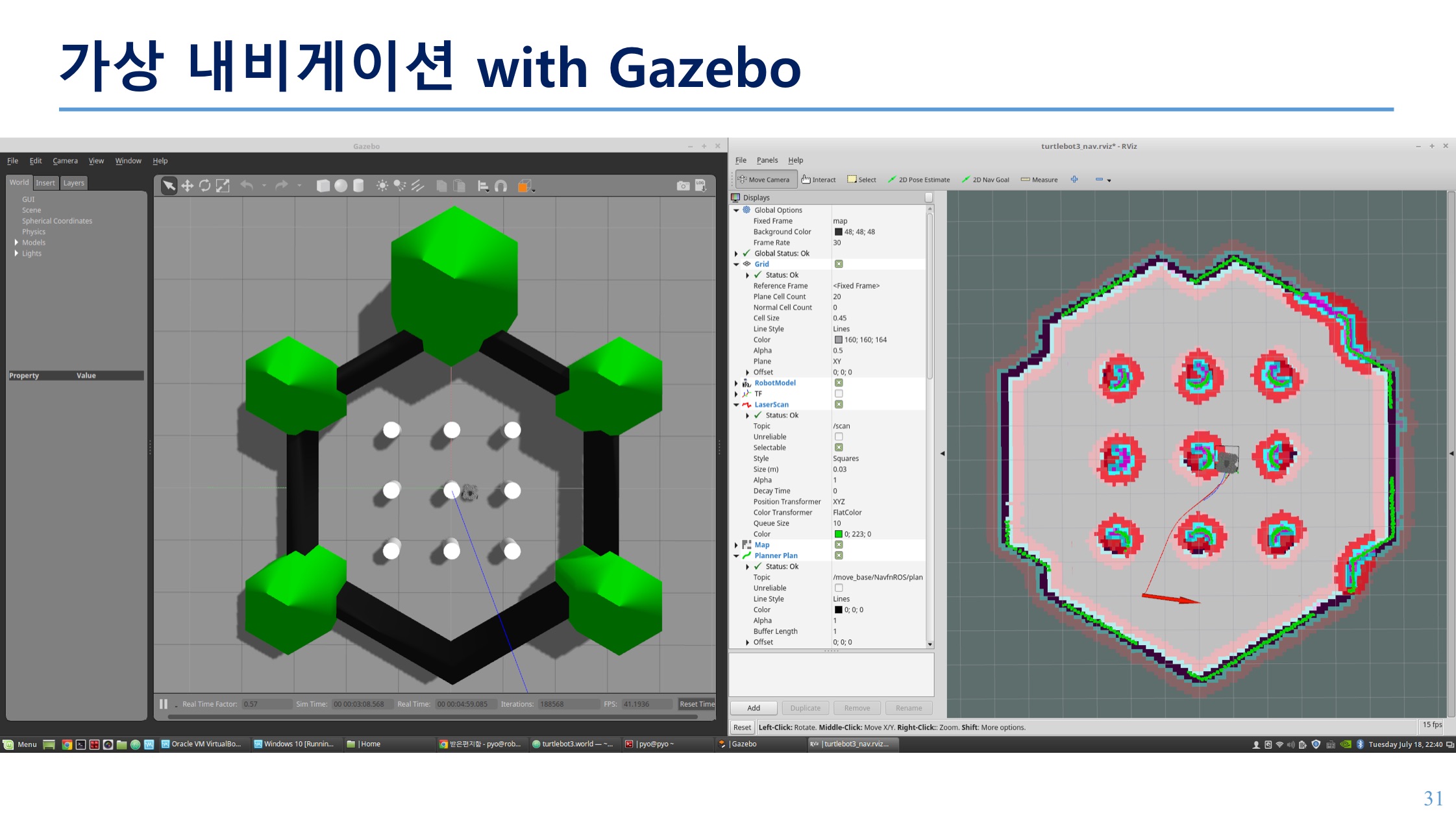
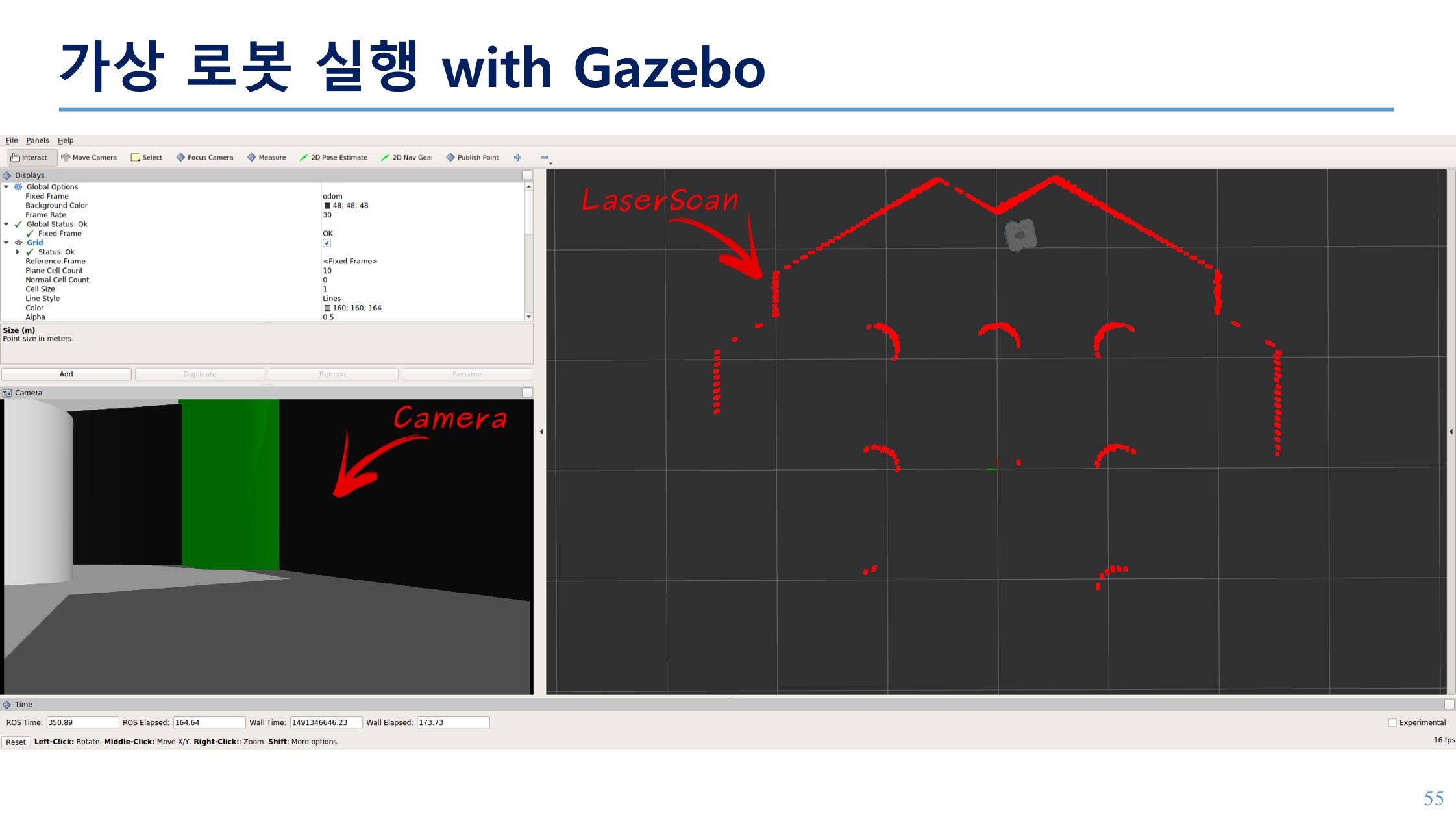
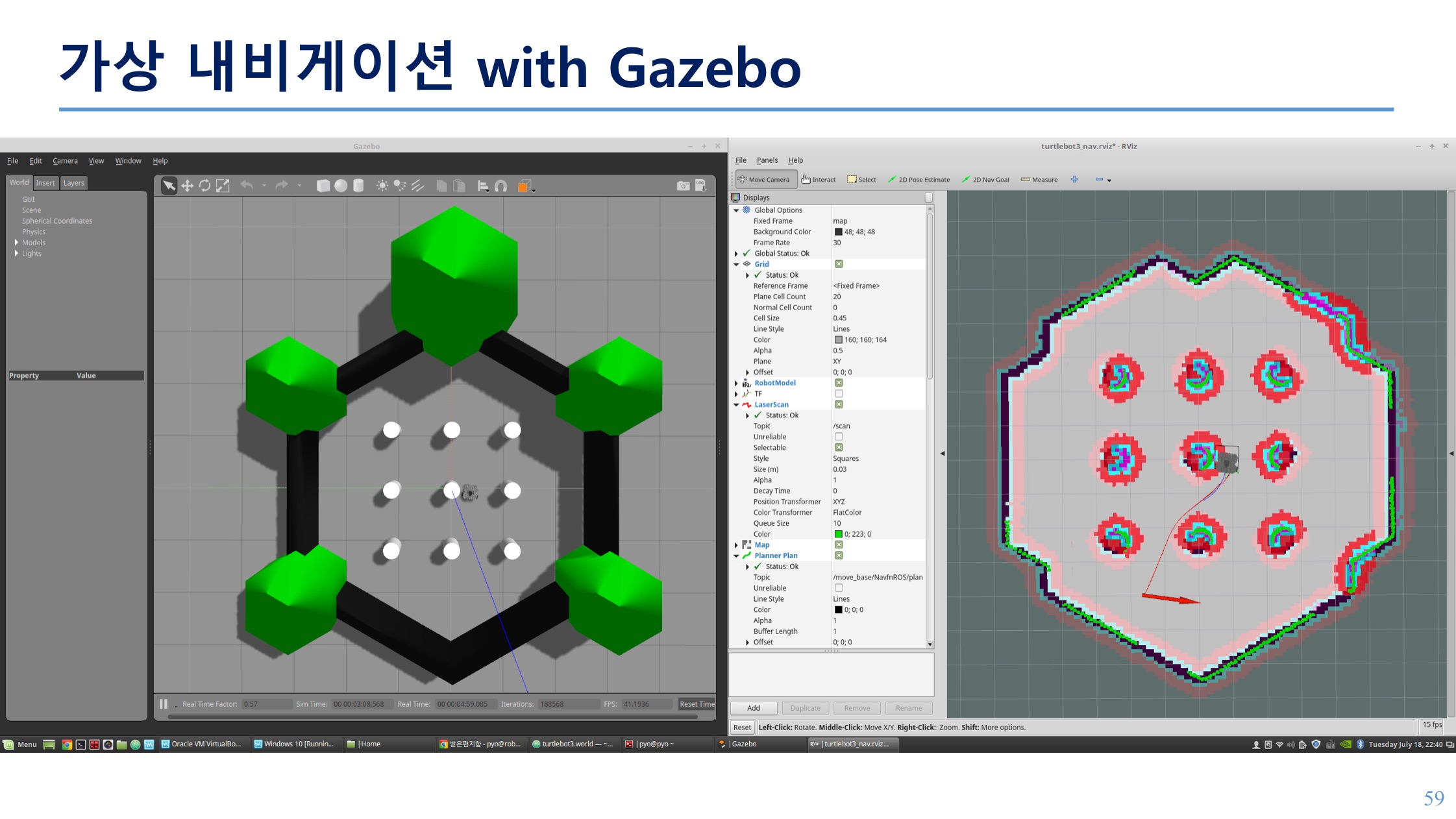
- 노드는 레이저로부터 토픽 /scan을 퍼블리시하며, 메시지 형태는 sensor_msgs/LaserScan이다.
- roscd: No such package/stack
setup파일의 설정을 source하여 저장해야함
http://wiki.ros.org/catkin/Tutorials/create_a_workspace
> source devel/setup.bash
작업 공간이 설정 스크립트에 의해 올바르게 오버레이되었는지 확인
> echo $ROS_PACKAGE_PATH - catkin_make가 구성 후속 빌드에 catkin_make만 사용 가능
















































반응형
'2025 > ROS' 카테고리의 다른 글
| Ubuntu 18.04 Melodic에 OpenCV 4.2.0 설치 (0) | 2022.06.01 |
|---|---|
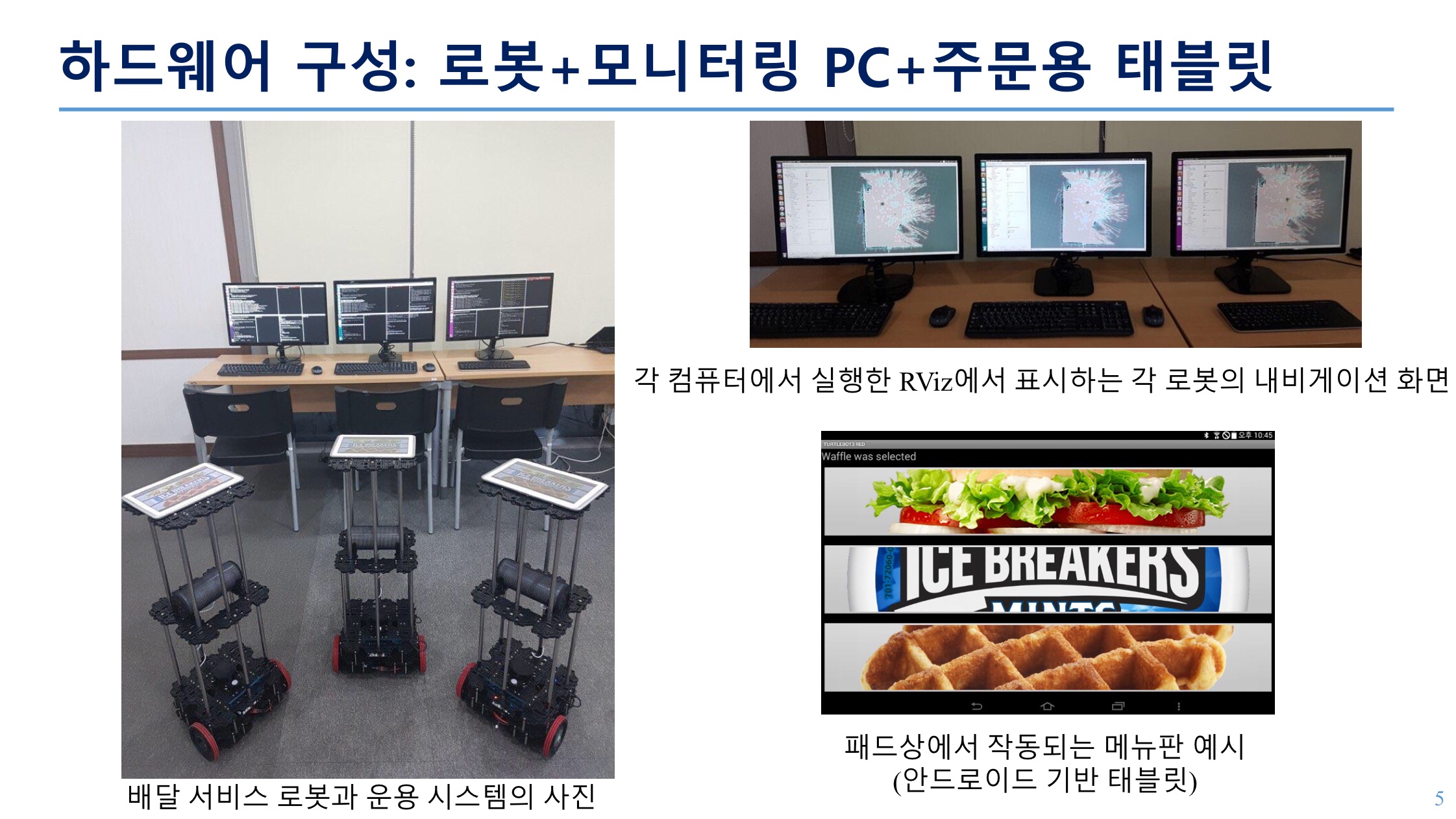
| 자율주행 플랫폼 하드웨어 구성 (0) | 2022.05.26 |
| E: Sub-process /usr/bin/dpkg returned an error code (2) (0) | 2022.05.06 |
| [Jetbot] Jetson nano Motor Control (0) | 2022.04.25 |
| [Jetbot] 장애물 충돌 회피와 차선 인식 (0) | 2022.04.20 |
'2025/ROS' Related Articles
more



Comments